
简评FRANKA EMIKA 机械臂

更新:2023.11.2日,FRANKA EMIKA 被思灵机器人收购。
个人观点,欢迎来拍。
1.创新点
- 精确力控
精确力控的功能有两个:一是能够实现安全的人机交互,对碰撞能够精确检测,保证安全性;二是能够实现拖动示教操作,辅助编程软件能够提高编程效率。
franka的力控技术继承自DLR,并且在轻量级机械臂(3KG)上发扬光大(坦诚的说3公斤负载有点太小,跟iiwa的7公斤14公斤查了很远,对应用限制很大),能够在极端情况下实现精确的碰撞检测(包括持刀扎肉,持钉扎气球等),创始人Sami自己本身对碰撞检测就有很深的研究,2017年2月Sami还投了一篇综述类文章:Robot Collisions: A Survey on Detection, Isolation, and Identification.
- 编程界面
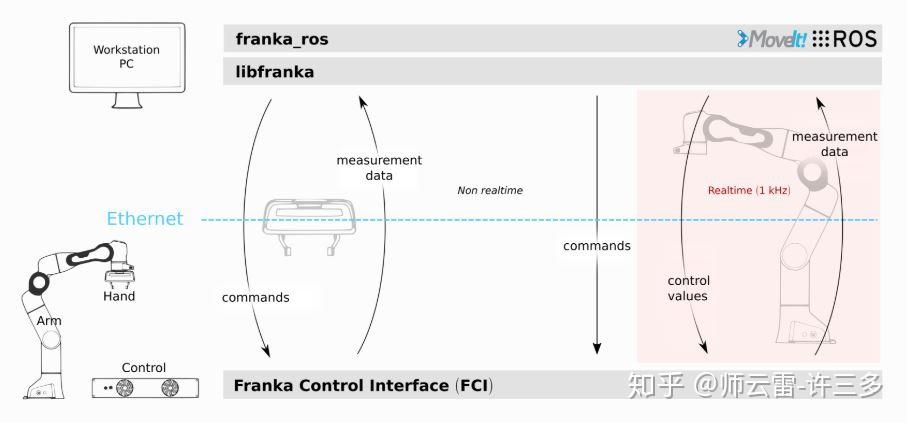
如果想对franka机械臂编程,他们提供两种方式:一种是用图形化拖动不同功能模块组合的方式;第二种是传统的调用API方式( libfranka: C++ library for Franka Emika research robots)
第一种方式其实在教育机器人上早已出现,目的是为了降低儿童编程的难度提高儿童兴趣,国内估计出现的时间应该是在2005年左右,那时候开始国内机器人比赛发展的如火如荼,这种编程方法更加直观简单,用户可以直接运行单个模块来理解代码;缺点是执行效率难以优化。
第二种方法就是学术界和工业界常用的编程控制方式。
总的来说franka的编程方式在易上手性和可玩性方面可能优于师祖KUKA的iiwa机械臂,iiwa还是近似工业机器人的思路,一个正统的smartPAD示教器,可以运行用Sunrise.Workbench编写好的运动代码。(本来想粘两张示意图上来,结果发现文档前面不允许披露给第三方····大公司真是够谨慎和封闭的)
而franka是可以很容易的和学术界常用的ROS链接使用,很多材料都是放在网上的。
另外,franka也把API公开放在网上,也有一些example可以供学习理解franka的控制思路: libfranka: C++ library for Franka Emika research robots 个人觉得还是很值得看一看的。

2.关键技术
创新点一般都要有关键技术来支持。
追根溯源的说,franka力控的关键技术是全状态反馈控制器(full state feedback controller),将位置、速度、力矩、力矩导数等4种信息(当然,其实就是位置信息和力矩信息,其他两个差分得到)都放在关节控制器里面做控制;franka引以为傲的碰撞安全和拖动性能都是以这个点为核心展开的。
这部分franka是没有开放给用户的,不过个人觉得一方面确实没必要开放,另一方面这个理论和技术确实是门槛,包括力矩传感器、动力学建模、增益参数设置等等;这里就不介绍太详细了,公式写出来一般也是很难理解透的,必须得配合实际调试才能理解透,我也是花了不少时间读文献加调试才理解个大概。
我目前的评价是:通过引入力矩传感器,设计的全状态反馈控制器能够很好的实现柔顺控制,其反驱效果不亚于用丝传动设计的WAM、Mako、da Vinci一代机器人等经典机械臂(美国方案),美国人和德国人在力控这条路上分别走了不同的路,感觉对比起来美国人更喜欢直接简单粗暴的方法,而德国人则愿意设计一套复杂的系统来实现目标(让我想起了美军的谢尔曼坦克和德军的虎式坦克)。
3.发展方向
即使是新技术,也必须要找到真正的需求点,比如说语音智能之前一直在死磕手机端(到现在我用的最多的也是让siri给我定个5分钟后的闹钟····),最后亚马逊发现智能音响是个突破口;无人机应用最早也是百花齐放,最后爆发点在航拍,也就是会飞的相机。
现在也很难看清franka下一代会往什么方向发展,毕竟还没看到有出货量巨大的协作/服务机械臂出现。
考虑到服务机器人和协作机器人在纯控制领域有很大的重合度(力控,智能交互,多传感器融合等,当然服务机器人对于智能的需求更高一筹),我觉得人形服务机器人可能会在中国触发突破,毕竟这种大型人形机器人能在中国深圳做到非常便宜,而且养老的需求对于中国独生子女们迫在眉睫。
家庭服务养老的市场,目前基本上是蓝海,谁拥有先进的技术,谁就能先下海摸鱼。




文章被以下专栏收录
