一种基于切换EID的二维重复控制系统设计方法
一种基于切换eid的二维重复控制系统设计方法
技术领域
1.本发明涉及控制理论与应用技术领域,尤其涉及一种基于切换eid的二维重复控制系统设计方法。
背景技术:
2.跟踪控制在工业中广泛应用,特别是对周期性任务的跟踪控制。重复控制具有自学习机制,通过时滞正反馈环节将上一个周期的跟踪误差引入到当前周期的控制输入,是一种跟踪或抑制周期信号的有效策略。然而,工程对象受到的扰动往往是非周期的,这类非周期扰动会恶化重复控制器的性能,致使同时满足跟踪与扰动抑制的要求面临挑战。
3.在实际中,一般无法直接测量扰动的作用量,多数情况都是通过构造观测器来估计系统的实际状态,而扰动的信息就隐藏在观测器的输出估计误差中。等价输入干扰方法则利用这个输出估计误差进行二自由度的主动扰动抑制,其中一个自由度用于一般反馈控制,另一个自由度用于扰动估计与补偿控制。传统的luenberger观测器通过比例控制的方式进行估计,具有一定的保守性。另一方面,重复控制过程同时存在连续控制行为和离散学习行为,表现出连续/离散二维特性。以往通过lyapunov矩阵求解二维状态反馈增益矩阵的方法既造成了lyapunov矩阵的保守性也会限制控制器的求解范围,导致高精度跟踪控制性能受限。
4.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
5.为解决上述技术问题,本发明提供一种基于切换eid的二维重复控制系统设计方法,基于切换eid的二维重复控制系统包括:外环结构和内环结构;
6.外环结构包括:重复控制器、状态反馈控制器和控制对象;
7.内环结构包括:切换eid估计器和比例积分观测器;
8.包括步骤:
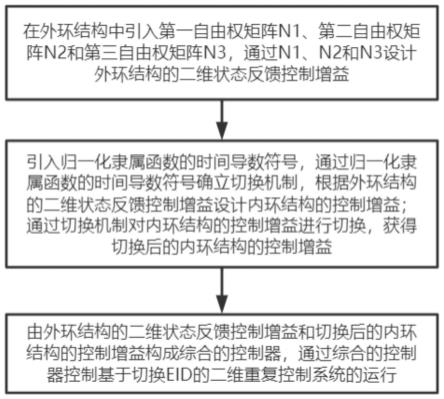
9.s1:在外环结构中引入第一自由权矩阵n1、第二自由权矩阵n2和第三自由权矩阵n3,通过n1、n2和n3设计外环结构的二维状态反馈控制增益;
10.s2:引入归一化隶属函数的时间导数符号,通过归一化隶属函数的时间导数符号确立切换机制,根据外环结构的二维状态反馈控制增益设计内环结构的控制增益;通过切换机制对内环结构的控制增益进行切换,获得切换后的内环结构的控制增益;
11.s3:由外环结构的二维状态反馈控制增益和切换后的内环结构的控制增益构成综合的控制器,通过综合的控制器控制基于切换eid的二维重复控制系统的运行。
12.优选的,步骤s1具体为:
13.s11:构建外环结构的状态反馈控制器,表示为:
[0014][0015]
其中,u
′
(k,τ)为外环结构的状态反馈控制器的输出;为外环结构的二维状态反馈控制增益,w∈[0,1)为重复控制器中常值滤波器的参数;为外环结构当前时刻的状态变量;xw(k-1,τ)为上一时刻重复控制器中常值滤波器w所在通道的输出变量;k表示各个周期间的离散序列映射,τ表示每个周期内的连续时间映射;表示隶属函数;
[0016]
s12:通过n1、n2和n3构造第一零等式和第二零等式,获得外环结构的稳定性条件;
[0017]
s13:通过外环结构的状态反馈控制器和外环结构的稳定性条件求解获得外环结构的二维状态反馈控制增益
[0018]
优选的,步骤s12具体为:
[0019]
s121:第一零等式的表达式为:
[0020][0021]
第二零等式的表达式为:
[0022][0023]
其中,其中,的时间导数;表示外环结构上一时刻的状态变量;xw(k,τ)表示当前时刻重复控制器中常值滤波器w所在通道的输出变量;
[0024]
i和j表示模糊规则,r表示模糊规则的总和;和分别是模糊前提变量f(t)在第i条和第j条模糊规则下的隶属函数;ξ
2ij
为具有非零项的第一对称矩阵;
[0025]
为外环结构的第一系数矩阵,为外环结构的第二系数矩阵,为外环结构的第三系数矩阵,为外环结构的第四系数矩阵;
[0026]
s122:构建第一线性矩阵不等式,表达式为:
[0027][0028]
其中,φ
ii
表示由第i个模糊子系统与第i个模糊控制器构成的外环结构的第一线
性矩阵,φ
ij
表示由第i个模糊子系统与第j个模糊控制器构成的外环结构的第二线性矩阵,φ
ji
表示由第j个模糊子系统与第i个模糊控制器构成的外环结构的第三线性矩阵;
[0029]
外环结构的稳定性条件为:给定重复控制器中低通滤波器q(s)的截止频率ωq和常值滤波器w∈[0,1),若存在正调节参数{α,β,ε}和对称正定矩阵常值滤波器w∈[0,1),若存在正调节参数{α,β,ε}和对称正定矩阵m1∈rn×n,m2∈rn×q,m3∈rq×q,以及合适维数的矩阵和使得第一线性矩阵不等式成立;rn表示n维实向量空间。
[0030]
优选的,步骤s13具体为:
[0031]
外环结构的二维状态反馈控制增益的求解公式为:
[0032][0033]
其中,m和z为调节矩阵,其与自由权矩阵n1、n2、n3的关系为:n1=εn2,,c为控制对象的输出矩阵;iq和in分别为q维和n维单位矩阵;
[0034]
外环结构的二维状态反馈控制增益为:
[0035][0036]
优选的,步骤s2具体为:
[0037]
s21:引入归一化隶属函数的时间导数符号和由二进制值构成的向量hs,确立切换机制为:
[0038]
s22:当时,根据外环结构的二维状态反馈控制增益获得包含内环结构的二维重复控制系统的稳定性条件;通过包含内环结构的二维重复控制系统的稳定性条件,求解获得第s种切换模式下的内环结构的控制增益
[0039]
s23:根据切换机制对进行切换,获得切换后的内环结构的控制增益
[0040]
优选的,步骤s21具体为:
[0041]
s211:定义由r-1个隶属函数导数构成的向量及其符号向量,公式如下:
[0042][0043][0044]
其中,表示隶属函数的时间导数的集合;表示隶属函数的时间导数符号的集合;为由第i条模糊规则代表的隶属函数的缩写,表示第r-1条模糊规则下的隶属函数的时间导数;
[0045]
s212:考虑一个二进制向量并形成一个有限集合,如下式所示:
[0046]
h=(h1,h2,......,h
r-1
),
[0047]
h={hs|s=1,2,......,2
r-1
},
[0048]
其中,hi取二进制值{-1,1},hs包含r-1个二进制值,h为hs的集合;
[0049]
s213:考虑隶属函数的时间导数的符号,归一化隶属函数的时间导数符号,确立切换机制为
[0050]
优选的,步骤s22具体为:
[0051]
s221:定义二维重复控制系统的状态变量为ψ(k,τ),当时,引入3个自由权矩阵n4、n5和n6,构建第三零等式和第四零等式;
[0052]
s222:通过第三零等式和第四零等式获得包含内环结构的二维重复控制系统的稳定性条件;
[0053]
s223:通过包含内环结构的二维重复控制系统的稳定性条件求解出第s种切换模式下的内环结构的控制增益求解公式为:
[0054][0055]
其中,为具有合适维数的矩阵;bf为切换eid估计器中低通滤波器f(s)的参数。
[0056]
优选的,步骤s23具体为:
[0057]
s231:考虑由2条模糊规则构成的控制对象,定义r=2,则h={h1,h2},h1=(1),h2=(-1);
[0058]
s232:h1对应的内环结构的控制增益为h2对应的内环结构的控制增益为
[0059]
s233:当隶属函数的时间导数的符号时,获得切换后的内环结构的控制增益
[0060]
优选的,步骤s3具体为:
[0061]
s31:由外环结构的二维状态反馈控制增益和切换后的内环结构的控制增益构成综合的控制器
[0062]
s32:通过综合的控制器控制基于切换eid的二维重复控制系统的运行。
[0063]
本发明具有以下有益效果:
[0064]
利用了t-s模糊模型的隶属函数信息,使所设计的控制器考虑了系统的非线性;扩大了lyapunov空间上的自由条件,增加了控制器的求解范围,实现了二维非线性重复控制系统的高精度跟踪与扰动抑制,为提升非线性系统的跟踪与扰动抑制性能提供技术指导,具有深刻的理论价值与广阔的应用前景。
附图说明
[0065]
图1为基于切换eid的二维重复控制系统结构图;
[0066]
图2为本发明实施例方法流程图;
[0067]
图3基于切换eid的二维重复控制系统的控制输入信号图;
[0068]
图4基于切换eid的二维重复控制系统的跟踪误差效果图;
[0069]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0070]
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0071]
本发明提供一种基于切换eid的二维重复控制系统设计方法,参照图1,基于切换eid的二维重复控制系统包括:外环结构和内环结构;
[0072]
外环结构包括:重复控制器、状态反馈控制器和控制对象;
[0073]
具体的,重复控制器的输入为参考信号r(t)与实际输出y(t)之间的误差信号e(t);重复控制器的输出由低通滤波器q(s)所在通道的输出变量xr(t)和常值滤波器w所在通道的输出变量xw(t)构成,且xr(t)=e(t)+xq(t-t),xw(t)=e(t)+wxw(t-t),表明重复控制过程既包含一个周期内的连续控制行为又包含各个周期间的离散学习行为,具有连续/离散二维特性;xq(t)为低通滤波器q(s)的状态,xq(t-t)为低通滤波器q(s)上一时刻的状态,xw(t-t)表示上一时刻重复控制器中常值滤波器w所在通道的输出,t为参考输入信号的周期,w∈[0,1)为常值滤波器参数;状态反馈以重复控制器的输出xr(t)和xw(t)及观测器的估计状态为输入,由状态反馈控制器输出信号uf(t);重复控制器的作用是对周期的参考输入信号进行高精度地跟踪;状态反馈用于重复控制系统的镇定;
[0074]
内环结构包括:切换eid估计器和比例积分观测器(pio);
[0075]
具体的,切换eid估计器和pio形成复合结构,其控制增益是隶属函数相关的,且根据归一化的隶属函数的时间导数符号进行切换;其中pio用于对标称的控制对象进行重构,产生输出误差ye(t)并作为切换eid估计器的输入;经过切换eid得到滤波后的扰动估计在状态反馈uf(t)中被反向补偿,得到系统的控制输入u(t);复合切换pio-eid结构的作用是获取输出误差ye(t),并在系统的输入端补偿ye(t)中包含的扰动信息,使重复控制系统具有良好的跟踪与扰动抑制性能,其中切换eid估计器用于抑制对系统输出产生影响的外部扰动信号,并通过切换控制降低系统设计的保守性;
[0076]
参考图2,基于切换eid的二维重复控制系统设计方法包括步骤:
[0077]
s1:在外环结构中引入第一自由权矩阵n1、第二自由权矩阵n2和第三自由权矩阵n3,通过n1、n2和n3设计外环结构的二维状态反馈控制增益;
[0078]
s2:引入归一化隶属函数的时间导数符号,通过归一化隶属函数的时间导数符号确立切换机制,根据外环结构的二维状态反馈控制增益设计内环结构的控制增益;通过切换机制对内环结构的控制增益进行切换,获得切换后的内环结构的控制增益;
[0079]
s3:由外环结构的二维状态反馈控制增益和切换后的内环结构的控制增益构成综合的控制器,通过综合的控制器控制基于切换eid的二维重复控制系统的运行。
[0080]
本实施例中,步骤s1具体为:
[0081]
s11:构建外环结构的状态反馈控制器,表示为:
[0082][0083]
其中,u
′
(k,τ)为外环结构的状态反馈控制器的输出;为外环结构的二维状态反馈控制增益,w∈[0,1)为重复控制器中常值滤波器的参数;为外环结构当前时刻的状态变量;xw(k-1,τ)为上一时刻重复控制器中常值滤波器w所在通道的输出变量;k表示各个周期间的离散序列映射,τ表示每个周期内的连续时间映射;表示隶属函数;
[0084]
具体的,通过调整调节每个周期内的连续控制行为,调整调节各个周期间的离散学习行为;调节各个周期间的离散学习行为;为外环结构当前时刻的状态变量,x(k,τ)为控制对象的状态变量,xr(k,τ)为当前时刻重复控制器中低通滤波器q(s)所在通道的输出变量;
[0085]
s12:通过n1、n2和n3构造第一零等式和第二零等式,获得外环结构的稳定性条件;
[0086]
s13:通过外环结构的状态反馈控制器和外环结构的稳定性条件求解获得外环结构的二维状态反馈控制增益
[0087]
本实施例中,步骤s12具体为:
[0088]
s121:第一零等式的表达式为:
[0089][0090]
第二零等式的表达式为:
[0091][0092]
其中,其中,为的时间导数;表示外环结构上一时刻的状态变量;xw(k,τ)表示当前时刻重复控制器中常值滤波器w所在通道的输出变量;
[0093]
i和j表示模糊规则,r表示模糊规则的总和;和分别是模糊前提变量f(t)在第i条和第j条模糊规则下的隶属函数;ξ
2ij
为具有非零项的第一对称矩阵;
[0094]
具体的,具体的,
[0095][0096]
为外环结构的第一系数矩阵,为外环结构的第二系数矩阵,为外环结构的第三系数矩阵,为外环结构的第四系数矩阵;
[0097]
具体的:
[0098][0099][0100][0101][0102]ai
为第i条模糊规则下控制对象的系数矩阵,bi为第i条模糊规则下控制对象的输入矩阵,c为第i条模糊规则下控制对象的输出矩阵;ωq为低通滤波器q(s)的参数;w∈[0,1)为常值滤波器参数;矩阵{k
qj
,k
wj
,k
cj
}构成二维状态反馈控制增益;
[0103]
s122:构建第一线性矩阵不等式,表达式为:
[0104][0105]
其中,φ
ii
表示由第i个模糊子系统与第i个模糊控制器构成的外环结构的第一线性矩阵,具体为:性矩阵,具体为:性矩阵,具体为:
[0106]
φ
ij
表示由第i个模糊子系统与第j个模糊控制器构成的外环结构的第二线性矩阵,具体为:阵,具体为:阵,具体为:
[0107]
φ
ji
表示由第j个模糊子系统与第i个模糊控制器构成的外环结构的第三线性矩
阵,具体为:阵,具体为:阵,具体为:阵,具体为:
[0108]
外环结构的稳定性条件为:给定重复控制器中低通滤波器q(s)的截止频率ωq和常值滤波器w∈[0,1),若存在正调节参数{α,β,ε}和对称正定矩阵常值滤波器w∈[0,1),若存在正调节参数{α,β,ε}和对称正定矩阵m1∈rn×n,m2∈rn×q,m3∈rq×q,以及合适维数的矩阵和使得第一线性矩阵不等式成立;rn表示n维实向量空间。
[0109]
本实施例中,步骤s13具体为:
[0110]
外环结构的二维状态反馈控制增益的求解公式为:
[0111][0112]
其中,m和z为调节矩阵,其与自由权矩阵n1、n2、n3的关系为:n1=εn2,,c为控制对象的输出矩阵;iq和in分别为q维和n维单位矩阵;
[0113]
具体的,通过调整z矩阵调节影响离散学习行为的控制增益k
wj
;结合已知的k
wj
,调整m矩阵以调节影响连续控制行为的控制增益
[0114]
外环结构的二维状态反馈控制增益为:
[0115][0116]
本实施例中,步骤s2具体为:
[0117]
s21:引入归一化隶属函数的时间导数符号和由二进制值构成的向量hs,确立切换机制为:
[0118]
s22:当时,根据外环结构的二维状态反馈控制增益获得包含内环结构的二维重复控制系统的稳定性条件;通过包含内环结构的二维重复控制系统的稳定性条件,求解获得第s种切换模式下的内环结构的控制增益
[0119]
s23:根据切换机制对进行切换,获得切换后的内环结构的控制增益
[0120]
本实施例中,步骤s21具体为:
[0121]
s211:定义由r-1个隶属函数导数构成的向量及其符号向量,公式如下:
[0122][0123][0124]
其中,表示隶属函数的时间导数的集合;表示隶属函数的时间导数符号的集合;为由第i条模糊规则代表的隶属函数的缩写,表示第r-1条模糊规则下的隶属函数的时间导数;
[0125]
s212:考虑一个二进制向量并形成一个有限集合,如下式所示:
[0126]
h=(h1,h2,......,h
r-1
),
[0127]
h={hs|s=1,2,......,2
r-1
},
[0128]
其中,hi取二进制值{-1,1},hs包含r-1个二进制值,h为hs的集合;
[0129]
s213:考虑隶属函数的时间导数的符号,归一化隶属函数的时间导数符号,确立切换机制为
[0130]
本实施例中,步骤s22具体为:
[0131]
s221:定义二维重复控制系统的状态变量为ψ(k,τ),当时,引入3个自由权矩阵n4、n5和n6,构建第三零等式和第四零等式;
[0132]
具体的,第三零等式的表达式为:
[0133][0134]
第四零等式的表达式为:
[0135][0136]
其中,
[0137][0138][0139][0140]
x(k,τ)为控制对象的状态变量,xr(k,τ)为当前时刻重复控制器中低通滤波器q(s)所在通道的输出变量,xe(k,τ)为控制对象与pio的状态误差变量,为pio中积分通道的状态变量,xf(k,τ)为切换eid估计器中低通滤波器f(s)的状态变量;为ψ(k,τ)的时间导数;ψ(k-1,τ)表示二维重复控制系统上一时刻的状态;
[0141]
为具有非零项的第二对称矩阵,具体为:
为二维重复控制系统的第一系数矩阵,具体为:为二维重复控制系统的第一系数矩阵,具体为:具有以下非零项:具有以下非零项:具有以下非零项:具有以下非零项:为二维重复控制系统的第二系数矩阵,具体为:为二维重复控制系统的第二系数矩阵,具体为:为二维重复控制系统的第三系数矩阵,具体为:制系统的第三系数矩阵,具体为:为二维重复控制系统的第四系数矩阵,具体为:数矩阵,具体为:为二维重复控制系统的第五系数矩阵,具体为:且为待设计的第s种切换模式下内环结构的控制增益;af、bf、cf为切换eid估计器中低通滤波器f(s)的参数;
[0142]
s222:通过第三零等式和第四零等式获得包含内环结构的二维重复控制系统的稳定性条件;
[0143]
具体的,构建第二线性矩阵不等式,表达式为:
[0144][0145]
其中,为第i个第一模糊lyapunov矩阵,为第r个第一模糊lyapunov矩阵,为第i个第二模糊lyapunov矩阵,为第r个第二模糊lyapunov矩阵;表示由第i个模糊子系统与第j个模糊控制器构成的二维重复控制系统的第一线性矩阵,具体为:子系统与第j个模糊控制器构成的二维重复控制系统的第一线性矩阵,具体为:子系统与第j个模糊控制器构成的二维重复控制系统的第一线性矩阵,具体为:子系统与第j个模糊控制器构成的二维重复控制系统的第一线性矩阵,具体为:
[0146]
包含内环结构的二维重复控制系统的稳定性条件为:
[0147]
给定低通滤波器q(s)和f(s)的截止频率ωq和ωf、常值滤波器w∈[0,1)和构成二维状态反馈控制增益的矩阵{k
qj
,k
wj
,k
cj
},若存在正调节参数{γ,δ}和对称正定矩阵o∈rq×q,n6∈rq×q,n5=diag{n
51
,n
52
}∈r
(2n+3q)
×
(2n+3q)
,n
51
∈r
(n+q)
×
(n+q)
,以及合适维数的矩阵对于i=j=1,2,...,r,s=1,2,...,2
r-1
,使得第二线性矩阵不等式成立;
[0148]
s223:通过包含内环结构的二维重复控制系统的稳定性条件求解出第s种切换模式下的内环结构的控制增益求解公式为:
[0149][0150]
其中,为具有合适维数的矩阵;bf为切换eid估计器中低通滤波器f(s)的参数。
[0151]
本实施例中,步骤s23具体为:
[0152]
s231:考虑由2条模糊规则构成的控制对象,定义r=2,则h={h1,h2},h1=(1),h2=(-1);
[0153]
s232:h1对应的内环结构的控制增益为h2对应的内环结构的控制增益为
[0154]
s233:当隶属函数的时间导数的符号时,获得切换后的内环结构的控制增益
[0155]
本实施例中,步骤s3具体为:
[0156]
s31:由外环结构的二维状态反馈控制增益和切换后的内环结构的控制增益构成综合的控制器
[0157]
s32:通过综合的控制器控制基于切换eid的二维重复控制系统的运行。
[0158]
实验结果:
[0159]
本实施例中,以永磁同步电机为控制对象,控制目标为在设定转速r(t)下实现跟踪控制与扰动抑制,控制结果由跟踪误差e(t)显示。使用搭建的基于切换eid的二维重复控制系统进行实验,请参考图3和图4,实验结果如图3和4所示。由实验结果可知,电机可以迅速跟踪参考输入信号,使用切换eid估计器后,最大暂态误差为8rpm,稳态跟踪误差维持在
±
2rpm;而不使用切换eid估计器则使得暂态误差增加到30rpm,稳态误差增加到
±
5rpm。
[0160]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0161]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置
的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0162]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种催化裂化动力学参数自动更...
- 一种基于全屋智能家电控制的触...
- 一种通用FPGA调试装置的制...
- 一种分布式的水面舰艇和水下航...
- 一种发动机装配产线自动化控制...
- 一种便于安装和拆卸的手绑带、...
- 一种排种器智能电子驱动系统的...
- 一种遥控转运车及其控制系统和...
- 一种电动车控制器测试工装的制...
- 降低LDO输入输出电压差的电...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
智能灯光控制系统相关技术
- 一种节能型智能光固化系统的制造方法与工艺
- 一种控制系统、消毒灯及消毒灯的控制方法与流程
- 一种智能设备的灯光控制方法及装置与流程
- 一种智能灯光控制装置的制造方法
- 一种音乐喷泉的灯光控制系统的制造方法与工艺
- 车用智能灯光控制系统的制造方法与工艺
- 一种基于计算机控制的办公室灯光控制系统的制造方法与工艺
- 一种带光控经纬度智能用电保护装置及控制流程的制造方法
- 一种内饰灯的控制方法及系统与制造工艺
- 一种灯光控制系统的制造方法与工艺
rcu客房控制系统相关技术
- 基于dsp客房控制系统的制作方法
- 客房的自动检测系统的制作方法
- 客房智能控制方法、装置和系统的制作方法
- 3d眼镜控制系统的制作方法
- 旅游船客房呼叫系统的制作方法
- 无线客房控制系统的制作方法
- 出租车载客控制系统的制作方法
- 出租车载客控制系统的制作方法
- 一种网络远程客房入住控制系统的制作方法
- 一种客房管理系统及客房管理方法