污水SV30自动测定系统的制作方法
污水sv30自动测定系统
技术领域
1.本实用新型涉及污水处理检测装置,具体涉及一种污水sv30自动测定系统。
背景技术:
2.我国城镇污水处理厂大多建成年代久远,排放标准要求和自动化程度相对较低,随着我国经济的发展,水污染问题越来越严重,对污水厂污染物排放标准也越来越高,城镇污水处理提标改造势在必行。并且,近年来人工成本的大幅增加导致项目运行成本的增加,从源头解决这一问题就是进行自动化改造,从一切环节更替为自动化系统设备,如此不仅可节约人工成本,也能使得控制环节更加客观准确。自动化改造过程中,污水处理智能运行系统要求监测指标均通过在线监测。而sv30作为活性污泥的一项重要参数,在绝大多数项目上只能通过人工监测,及时性差,误差范围大,影响智能调控系统对参数的计算和反馈。严重的,还会导致污水处理中微生物活性的降低甚至崩溃。
3.目前虽然也有一些对sv30进行自动化检测的系统设备,但现有类似技术均是采用老式圆形量筒,导致图像识别困难或不准。并且现有技术采水取样后,没有自动清洗系统或虽然有清洗系统,但清洗效果不佳,多次使用后,大量残留以前采样留置液体沉渣,导致测定存在误差,影响检测结果。
技术实现要素:
4.本实用新型的目的是提供一种污水sv30自动测定系统,解决现有检测装置/ 系统存在因量筒结构不合理、自动清洗系统清洗效果不佳导致测定结果误差大的问题,实现污水sv30的自动、精确测定。
5.本实用新型的目的是这样实现的:
6.本技术的一种实施方案是,一种污水sv30自动测定系统,包括有透明量筒、污水进水机构、清水进水机构、污水排水机构和图像采集处理设备,在所述透明量筒内设置有清洗机构,所述清洗机构包括电机、由所述电机驱动的螺杆和设置于螺杆下端的清理刮头,所述电机驱动螺杆带动刮头在透明量筒内上下移动,实现对透明量筒内腔的清洗。
7.更为具体的一种实施例是,所述污水进水机构包括连接所述透明量筒的污水进水管路和设置于该管路上的污水进水泵,所述污水进水管路的出水口开口于透明量筒内侧壁上部;所述清水进水机构包括连接透明量筒的清水进水管路和设置于该管路上的清水进水泵,所述清水进水管路的出水口开口于所述透明量筒内侧壁上部;所述污水排水机构包括连接透明量筒的污水出水管路和设置于该管路上的污水排水泵,所述污水出水管路的进水口开口于透明量筒内底壁,在所述污水出水管路的进水口处设置有止回阀。
8.更为具体的一种实施例是,所述图像采集处理设备包括摄像头和计算机;所述摄像头连接计算机,用于对所述透明量筒进行图像采集;所述计算机分别连接所述摄像头和所述电机,用于根据图像采集结果控制所述电机的工作状态。
9.本技术的一种实施方案是,所述透明量筒具有圆形横截面内腔和矩形横截面外轮
廓,在所述透明量筒外侧面设置有容量刻度。矩形量筒的设计可降低老式圆形量筒由于摄像头成像导致的误差。
10.本技术的一种实施方案是,所述透明量筒具有向下凹陷的内底,所述刮头的形状与所述透明量筒内底形状匹配。一种更好的实施方案是,所述透明量筒具有向下凹陷的弧形内底,或所述透明量筒具有向下凹陷的上宽下窄的倒锥形或到锥台形内底。这样的内底设计以及刮头设计,可以保证沉淀后的污泥更顺利的排出至污水出水管路,避免污泥在透明量筒底部堆积无法顺利排出。
11.本技术的一种实施方案是,所述清洗机构还包括对所述刮头进行清理的增压喷头,所述增压喷头连接于所述清水进水机构在所述透明量筒内的出水口处并设置于所述刮头上方,并在所述刮头上开设有漏水孔。刮头经多次使用后会有一些污泥残留,需要定期清理,本实施方案通过在刮头上方设置增压喷头以及在所述刮头上开设漏水孔,实现对刮头的清理,冲洗污水通过污水出水管路排出至好氧池即可。
12.本技术实施方案具有如下技术效果:
13.目前针对sv30自动测定的现有技术往往存在不够自动化或精确度低的问题,本技术实施方案在自动测定的工艺环节都进行了最合理的设计,准确度方面也优于现有发明技术,完全脱离人工进行该工序的运行,能够完全在没有人员进行辅助操作的情况对污水处理厂中好氧池内的sv30进行测定。本技术实施采用矩形刻度量筒可减少老式圆形量筒由于摄像头成像导致的误差;自动清洗机构可以解决目前技术中仅排水后,前一次测定的液体样品残留问题,对测定数据的准确性有进一步提高。
附图说明
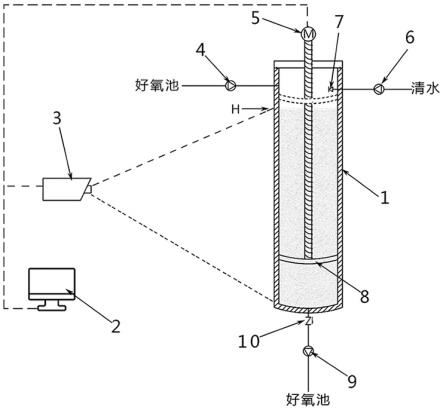
14.图1是本实用新型结构示意图。
15.图2是透明量筒及刮头半剖结构透视图。
16.图中:1、透明量筒,2、计算机,3、摄像头,4、污水进水泵,5、电机,6、清水进水泵,7、增压喷头,8、刮头,9、污水排水泵,10、止回阀,11、漏水孔。
具体实施方式
17.下面通过具体实施例对本技术技术方案做进一步详细说明。
18.实施例1
19.如图1所示,本技术的污水sv30自动测定系统主要包括透明量筒1和对透明量筒1进行清理的清洗机构以及污水进水机构、污水排水机构、清水进水机构、图像采集处理设备。
20.污水进水机构由连通好氧池和透明量筒1的污水进水管路和设置于该管路上的污水进水泵4构成,并在污水进水泵4上通过两芯电源线连接对其启闭进行计时控制的计时器(第一计时器),污水进水管路的进水端连接好氧池,出水端连接透明量筒1(出水口开口于透明量筒1的内侧壁上部)。污水排水机构由连通好氧池和透明量筒1的污水出水管路和设置于该管路上的污水排水泵9构成,并在污水排水泵9上连接有对其启停进行计时控制的计时器(第二计时器)。污水出水管路的进水口开口于透明量筒1内底壁,在污水出水管路的进水口处还设置有止回阀10,污水出水管路的出水端连接好氧池。清水进水机构由连通清水
池或清水源的清水进水管路和设置于该管路上的清水进水泵6构成,在清水进水泵6上设置有对其启停进行计时控制的计时器(第三计时器)。清水进水管路的出水口开口于透明量筒内侧壁上部,进水端连接清水源。
21.清洗机构包括电机5、由电机5驱动的螺杆和设置于螺杆下端的刮头8,电机5通过驱动螺杆带动刮头8在透明量筒1内上下移动实现对透明量筒1内腔的清洗,这一部分的机械传动结构附图中未明确示出,其按照常规传动连接方式设置即可。
22.本实施例中,透明量筒1的结构如图2所示,采用外方内圆的结构设计,即其具有圆形横截面内腔和矩形横截面外壁,并圆锥形内底,在透明量筒1的外侧壁有容积刻度。刮头8的结构与内底结构相匹配,为倒锥台形。刮头8上升至最高点时,污水出水口和清水出水口的开口位置设置于刮头8下方,透明量筒1设计最高水位线(见图1中h)不超过两个出水口高度。
23.图像采集处理设备包括摄像头3和计算机2。摄像头3采用6芯电源信号线连接计算机2,放置在矩形透明量筒1刻度正面适距位置,用于对透明量筒1进行图像采集;计算机2分别连接摄像头3和电机5,并设定有自识别程序,用于根据图像采集结果控制电机5的工作状态。
24.本系统的运行过程如下:
25.首先启动电机5,将刮头8升至透明量筒1内最高点,然后第一计时器计时设定启动污水进水泵4,向透明量筒1内注入待测定污水,根据透明量筒1容量 (液面最高点h)及水泵流量,预先为第一计时器设定好时间,待计时结束,关闭污水进水泵4。
26.一定时间后,待摄像头3采集图像完毕,启动污水排水泵9,将污水排出至好氧池(启动及排水时间通过第二计时器控制),止回阀10可以避免进水过程中部分污水进入污水出水管路导致测量误差。
27.一般情况下,污水排水完毕后,启动清水进水泵6(启动及进水时间通过第三计时器控制),对透明量筒1进行冲洗,冲洗水通过污水排水泵9排出即可。但当透明量筒1内残留污泥过多影响测定时,则由计算机程序控制启动电机5,控制刮头8向下移动,对透明量筒1内壁进行清理,待刮头8返回原位后,再启动清水进水泵6进水,对透明量筒1进行冲洗,冲洗结束后,启动污水排水泵9,将冲洗水排出至好氧池即可。刮头8运行频率可以预先设定,最好是每次sv30 测定后都运行一次对透明量筒1内腔进行清理。
28.本实施例通过为各水泵上的计时器预先设定好时间,实现各进排水系统及清洗系统的自动工作。自识别系统安装在计算机2中,通过对摄像头3拍摄的图像进行灰度处理,对比计算机2中预制刻度图像后,进行sv30测定
29.实施例2
30.本实施例与实施例1的区别是,在清水进水机构的出水口处还设置有一个增压喷头7(见图1),刮头8上升至最高点时,污水出水口开口位置设置于刮头8 下方,增压喷头7设置于刮头8上方,且刮头8设置为具有漏水孔11的结构(如图2所示)。
31.以上通过两个具体实施例对本技术技术方案进行了详细说明,在权利要求范围内对以上实施例所进行的所有实施方式均为本技术保护范围,实施例不作为对权利要求保护范围的限制。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 管件内径检测装置的制作方法
- 一种抗震能力强的涡街流量计的...
- 一种无人机勘查用资源取样装置...
- 一种工件高度检具的制作方法
- 一种搅拌罐体满载空载判断装置...
- 一种电流检测电路及芯片的制作...
- 一种测试装置的制作方法
- 一种新能源汽车窗换挡控制自动...
- 用于监测运营隧道的分布式定点...
- 应用于光传感器的彩色滤光片、...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1