调姿机构、机头对合系统及方法与流程
本发明涉及飞机装配领域,具体是一种用于调整物体姿态的调姿机构,以及包括该调姿机构的机头对合系统,以及通过该机头对合系统进行机头对合的方法。
背景技术:
1、机头上部组件和机头下部组件在对合装配过程中,机头上部组件与机头下部组件都要求具有正确的位置及姿态。机头下部组件固定连接在工装底座,机头上部组件需要通过调姿机构不断调整其位置及姿态,到达与机头下部组件对合的正确位置。
2、现有的调姿机构是一种可以实现三个方向独立运动的机构。为了实现三维方向的独立运动及控制,当要实现精细化调整时,调姿机构结构往往非常复杂,不仅导致成本高,还影响调姿机构的稳定性和可靠性。调姿机构按照动力的不同,分为手动驱动和电动驱动;产品姿态监测分为人工监测和激光跟踪仪监测,常见调姿机构组合为:手动驱动配合人工监测与电动驱动配合激光跟踪仪监测。对于手动驱动配合人工监测,进行机头上部组件和机头下部组件的对合装配,通常采用四组调姿机构进行调姿,每组调姿机构均需要一个人操作手轮,另需要一个人肉眼观察机头上部组件的姿态,该方式对人员经验要求高,多组调姿机构之间无法做到协同工作,可靠性不高,对合精度低。对于电动驱动配合激光跟踪仪监测,激光跟踪仪成本高,还需要配合复杂的算法以提高调姿精度,数控程序及设备成本高。
技术实现思路
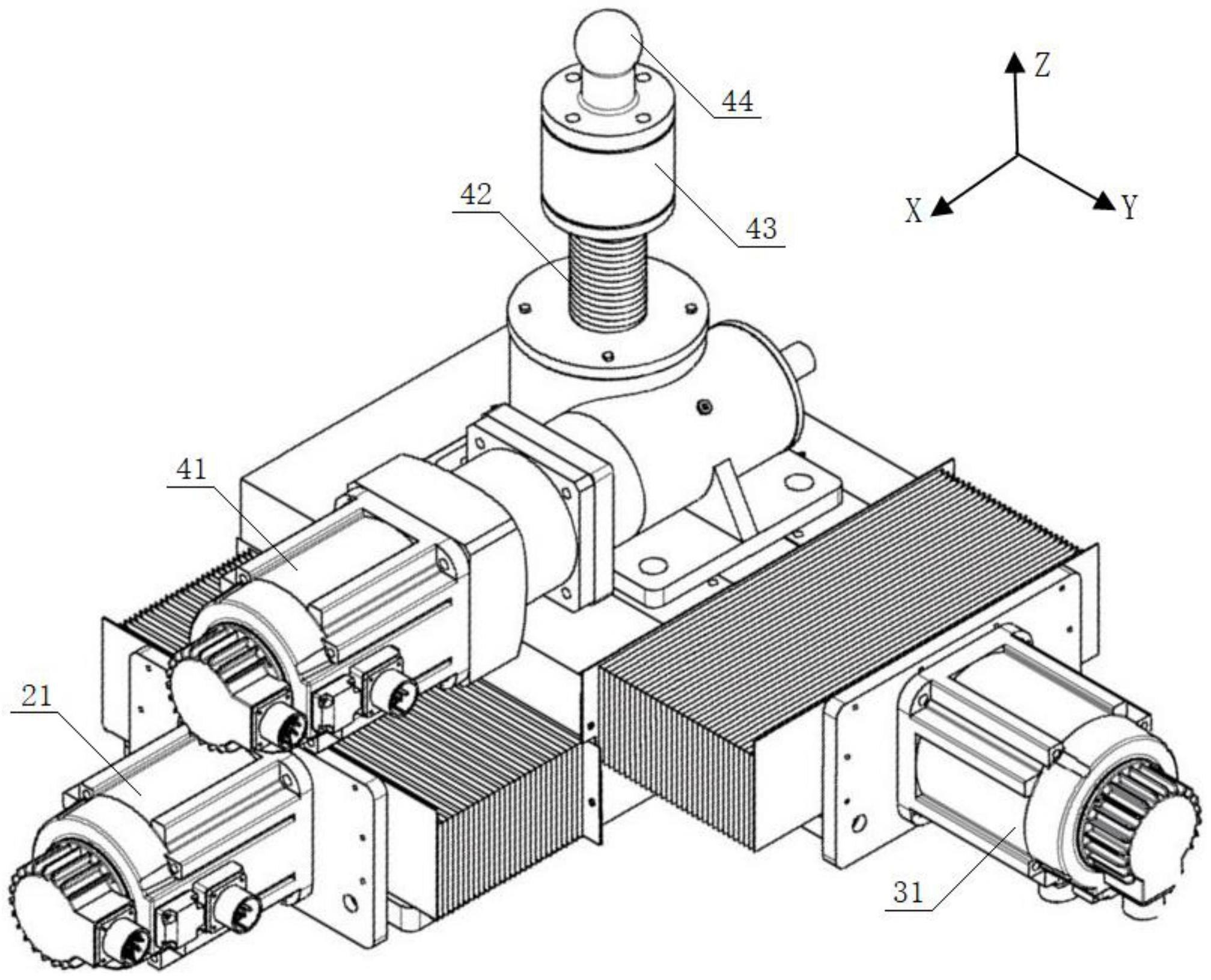
1、本发明首先提供一种调姿机构,目的是通过简单的结构实现三维方向的精细化调整,采用的技术方案是:调姿机构,包括底座、x向运动机构、y向运动机构和z向运动机构;x向运动机构包括固定安装于底座的x向伺服电机和x向导轨,x向导轨上设置x向滑块,x向伺服电机的输出轴通过联轴器和滚珠丝杆套件与x向滑块相连;y向运动机构包括固定安装于x向滑块的y向伺服电机和y向导轨,y向导轨上设置y向滑块,y向伺服电机的输出轴通过联轴器和滚珠丝杆套件与y向滑块相连;z向运动机构包括固定安装于y向滑块的z向伺服电机和z向丝杆机构,z向丝杆机构的顶端为支撑端,z向伺服电机的输出轴通过联轴器与z向丝杆机构相连。
2、为了对支撑端的受力进行实时监测,进一步的是:z向丝杆机构的顶端设置三向力传感器。具体的:z向丝杆机构的支撑端设置球头支撑座,三向力传感器位于球头支撑座与z向丝杆机构之间。
3、z向丝杆机构的顶端需要直接承受荷载,为了确保z向丝杆机构在姿态调试完成后的稳定,进一步的是:z向运动机构还包括用于锁止z向丝杆机构的锁紧器。
4、本发明调姿机构的有益效果是:调姿机构的x向运动机构、y向运动机构和z向运动机构中任意两个的运动方向均相互垂直,调姿机构通过x向伺服电机、y向伺服电机和z向伺服电机对三维方向进行单独控制,三维方向上的运动互不影响,而且三维方向运动量控制精度高,可达0.01mm。调姿机构结构简单,总体成本可控,稳定性好,可靠性高。四个调姿机构的x向伺服电机、y向伺服电机和z向伺服电机的转速均可调整,当支撑端某方向需要调整的距离较大时,可先控制对应的伺服电机快速运动,然后控制对应的伺服电机慢速运动至需要的位移;当支撑端某方向需要调整的距离较小时,可控制对应的伺服电机慢速运动至需要的位移。z向丝杆机构的顶端设置三向力传感器,可判断z向丝杆机构的支撑端是否存在过高应力,进而避免损伤产品。
5、本发明还提供一种机头对合系统,目的是在保证对合精度要求的前提下,降低机头对合装配的成本,采用的技术方案是:机头对合系统,包括工装底座,工装底座设置用于与机头下部组件配合的定位块,工装底座相对的两侧分别设置两个上述任一调姿机构,四个调姿的z向丝杆机构的运行方向相互平行并与工装底座所在平面垂直。
6、进一步的是:机头对合系统还包括控制台,控制台配备控制器,四个调姿的x向伺服电机、y向伺服电机和z向伺服电机均与控制台电连接。
7、进一步的是:四个调姿机构均设置三向力传感器,各个三向力传感器均与控制台电连接。
8、为了便于精准地调整固定机头上部组件和机头下部组件的姿态,并保证对合装配的安全,进一步的是:工装底座还安装前端定位器组件和后端定位器组件,前端定位器组件和后端定位器组件分别设置于工装底座未设置调姿机构的两侧。
9、本发明还提供一种机头对合方法,目的同样是在保证对合精度要求的前提下,降低机头对合装配的成本,采用的技术方案是:机头对合方法,通过上述任一机头对合系统进行机头上部组件和机头下部组件的对合装配,包括下述步骤:
10、s1、将机头下部组件通过定位块固定于工装底座。
11、s2、调整四个调姿机构,使x向运动机构、y向运动机构和z向运动机构在各自的运动方向上均有行程余量。
12、s3、将机头上部组件吊装至四个调姿机构的z向丝杆机构的支撑端。
13、s4、观察机头上部组件的姿态,通过四个调姿机构将机头上部组件调整至与机头下部组件对合的姿态。
14、进一步的是:四个调姿机构均设置三向力传感器,步骤s4还监测各个三向力传感器的应力,并结合应力调整四个调姿机构。
15、s5、进行机头上部组件和机头下部组件的对合装配。
16、本发明机头对合系统及方法的有益效果是:机头下部组件通过定位块固定于工装底座后,再利用四个调姿机构对机头上部组件进行协同调整,四个调姿机构既可以单个调整,也可以任意两个联动调整,还可以四个同步调整,实现对机头上部组件姿态的准确、快速调整。机头上部组件通过其与工装底座的相对姿态即可进行调姿,无需复杂计算程序计算机头上部重心位置,节省控制系统成本。x向伺服电机、y向伺服电机和z向伺服电机的转速可以调整,可以根据机头上部组件和机头下部组件的相对距离调整对应的伺服电机的转速,从而节省机头上部组件的调姿时间。通过记录每个调姿机构的支撑端的三维数据,可以为下一次的对合装配提供依据,实现快速对合,节省时间。
技术特征:
1.调姿机构,其特征在于:包括底座(1)、x向运动机构、y向运动机构和z向运动机构;x向运动机构包括固定安装于底座(1)的x向伺服电机(21)和x向导轨(22),x向导轨(22)上设置x向滑块(23),x向伺服电机(21)的输出轴通过联轴器和滚珠丝杆套件与x向滑块(23)相连;y向运动机构包括固定安装于x向滑块(23)的y向伺服电机(31)和y向导轨(32),y向导轨(32)上设置y向滑块(33),y向伺服电机(31)的输出轴通过联轴器和滚珠丝杆套件与y向滑块(33)相连;z向运动机构包括固定安装于y向滑块(33)的z向伺服电机(41)和z向丝杆机构(42),z向丝杆机构(42)的顶端为支撑端,z向伺服电机(41)的输出轴通过联轴器与z向丝杆机构(42)相连。
2.如权利要求1所述的调姿机构,其特征在于:z向丝杆机构(42)的顶端设置三向力传感器(43)。
3.如权利要求2所述的调姿机构,其特征在于:z向丝杆机构(42)的支撑端设置球头支撑座(44),三向力传感器(43)位于球头支撑座(44)与z向丝杆机构(42)之间。
4.如权利要求1、2或3所述的调姿机构,其特征在于:z向运动机构还包括用于锁止z向丝杆机构(42)的锁紧器。
5.机头对合系统,包括工装底座(5),工装底座(5)设置用于与机头下部组件配合的定位块(6),其特征在于:工装底座(5)相对的两侧分别设置两个如权利要求1~4任一项所述的调姿机构,四个调姿的z向丝杆机构(42)的运行方向相互平行并与工装底座(5)所在平面垂直。
6.如权利要求5所述的机头对合系统,其特征在于:机头对合系统还包括控制台,控制台配备控制器,四个调姿的x向伺服电机(21)、y向伺服电机(31)和z向伺服电机(41)均与控制台电连接。
7.如权利要求6所述的机头对合系统,其特征在于:四个调姿机构均设置三向力传感器(43),各个三向力传感器(43)均与控制台电连接。
8.如权利要求5、6或7所述的机头对合系统,其特征在于:工装底座(5)还安装前端定位器组件(7)和后端定位器组件(8),前端定位器组件(7)和后端定位器组件(8)分别设置于工装底座(5)未设置调姿机构的两侧。
9.机头对合方法,其特征在于:通过上述权利要求5~8任一项所述的机头对合系统,进行机头上部组件和机头下部组件的对合装配,包括下述步骤:
10.如权利要求9所述的机头对合方法,其特征在于:四个调姿机构均设置三向力传感器(43),步骤s4还监测各个三向力传感器(43)的应力,并结合应力调整四个调姿机构。
技术总结
本发明公开了一种调姿机构、机头对合系统及方法,涉及飞机装配领域,目的是通过简单的结构实现三维方向的精细化调整,采用的技术方案是:调姿机构,包括底座、X向运动机构、Y向运动机构和Z向运动机构,调姿机构通过X向伺服电机、Y向伺服电机和Z向伺服电机对三维方向进行单独控制,三维方向的运动互不影响,控制精度高,结构简单。机头对合系统,在保证对合精度要求的前提下,降低机头对合装配成本,采用的技术方案是:机头对合系统,包括工装底座,工装底座设置用于与机头下部组件配合的定位块,工装底座的两侧分别设置两个调姿机构。机头对合方法,通过机头对合系统进行机头上部组件和机头下部组件的对合装配。本发明用于机头的对合装配。
技术研发人员:何国伟,邓伯孟,邓飞虎,庄期能,李巨龙,王海玲
受保护的技术使用者:中航成飞民用飞机有限责任公司
技术研发日:
技术公布日:2024/1/13
- 一种无人机动力传动装置的制作...
- 一种弹射起飞无人机的制作方法
- 一种机体内可部署多种计算和传...
- 一种垂直起降货运无人机及基于...
- 一种精准降落的无人机单人作业...
- 适用于微小卫星柔性铰链连接的...
- 一种地形测绘倾斜摄影装置的制...
- 一种服务航天器悬停控制方法与...
- 一种输电线路用无人机巡检装置...
- 一种云喊话无人机的制作方法
- 还没有人留言评论。精彩留言会获得点赞!