-
硬件参数设置
- 请前往" 常用软件下载"将"硬件参数配置软件"解压包下载到电脑。
- 解压完解压包双击打开setup.exe文件。
- 打开软件弹出窗口
- 选择正确的串口,波特率和转换器类型,点击OPEN。
- 连接成功后会出现这样的弹窗
- 页面所示按键功能
- 控制栏
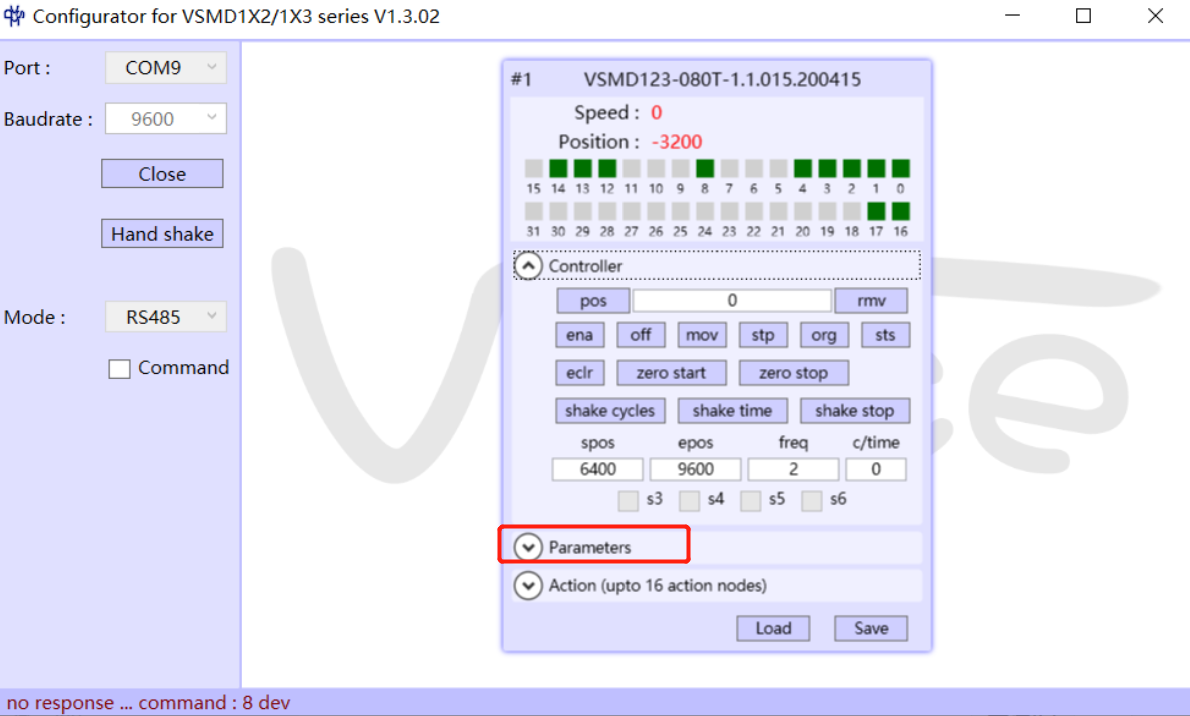
- 参数的设置 点击Parameters展开参数栏
- 参数可根据不同的情况进行修改。下面为每个参数的作用解释。 bdr: 通讯波特率,默认是 9600
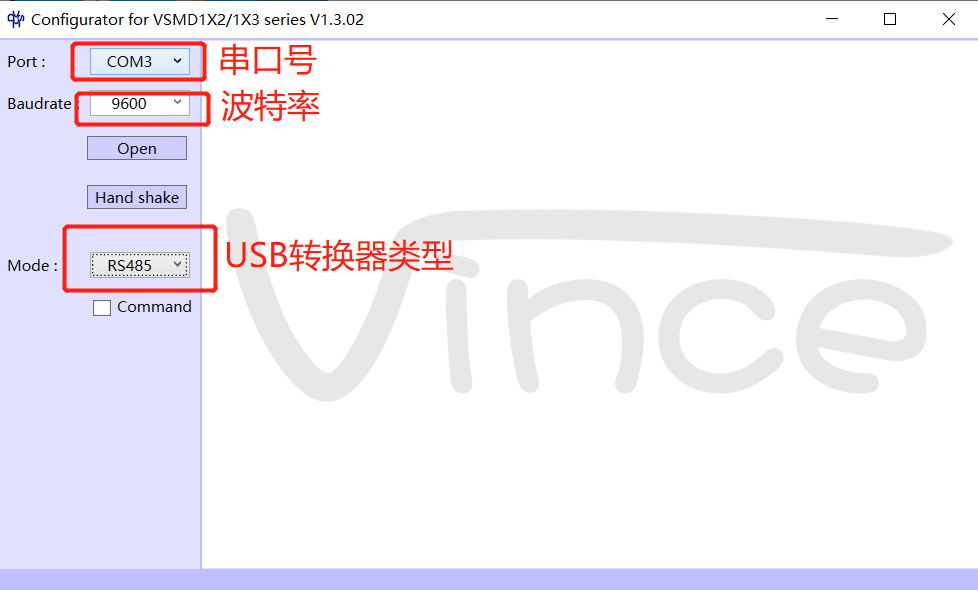
串口选择你接入电脑的USB口,波特率选择9600,串口转换器类型使用的是RS485就选择RS485类型。
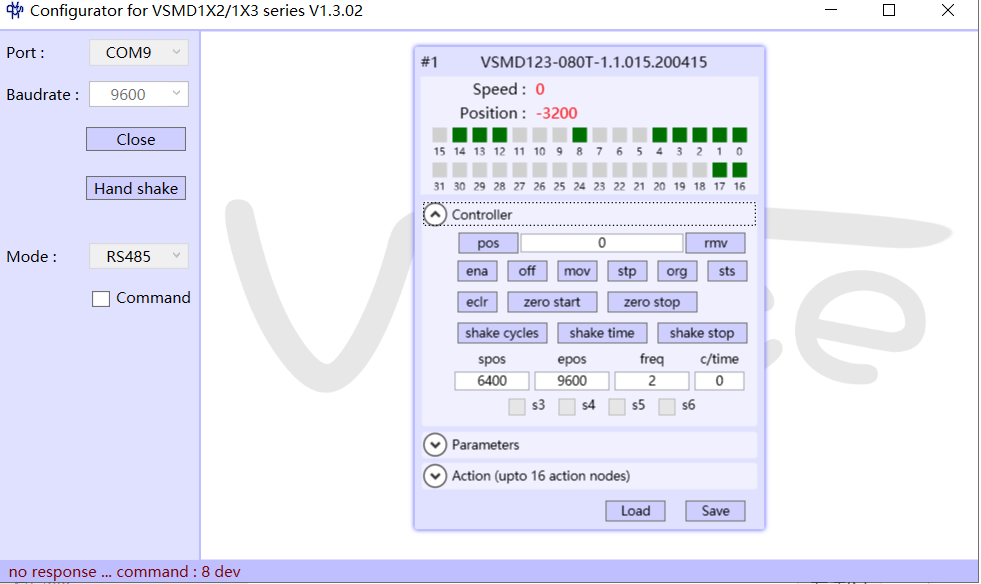
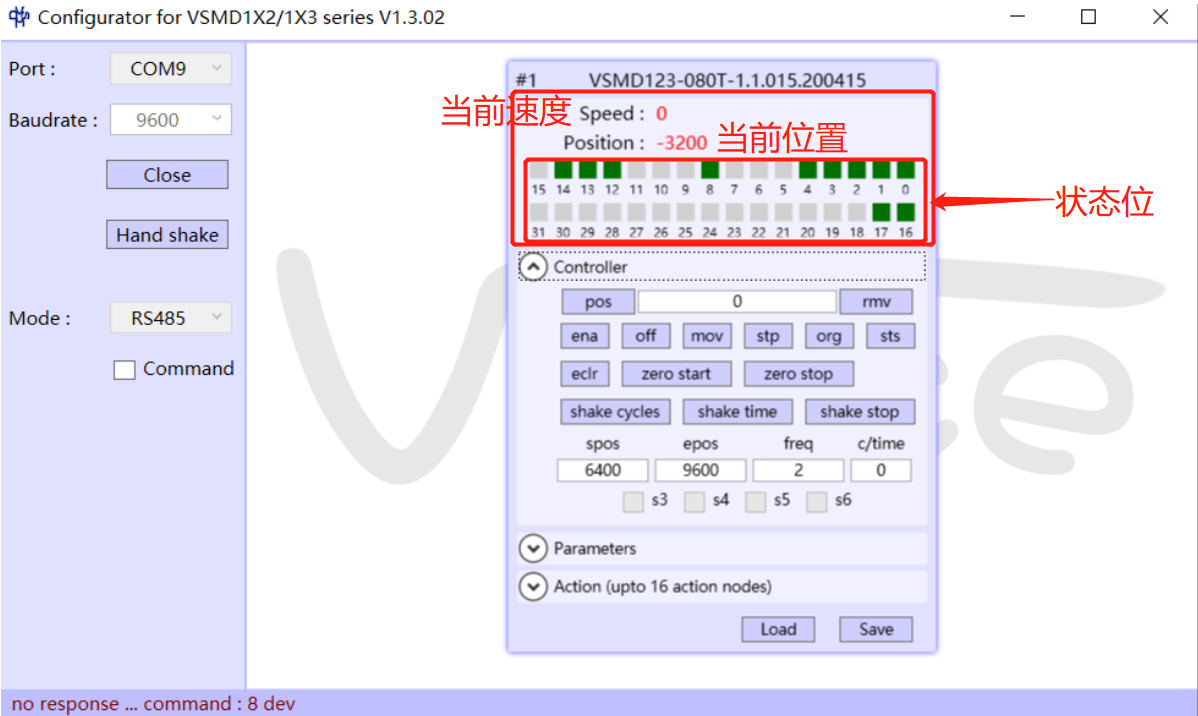
Speed:是当前移动的速度。
Position:是当前的位置。
状态位内:(绿色代表高电平1,灰色代表低电平0)
0 :传感器 1 状态信息
1 :传感器 2 状态信息
2 :传感器 3 状态信息(正交信号 A-状态信息)
3 :传感器 4 状态信息(正交信号 B-状态信息)
4 :是否到达设置位置,1 代表到达,0 代表没有到达
5 :是否到达设置速度,1 代表到达,0 代表没有到达
6 :硬件错误报警,1 代表出现硬件错误,需要重新上电
7 :是否停止在零点标价,1 代表停止在零点
8 :电机运行停止标记位,1 代表停止,0 代表运行
9 :命令正确与否标记位,1 代表发送命令错误,0 代表正确
10 :读写存储器错误标记位,1 代表读写存储器错误,0 代表正确
11 :离线模式运行标记位,1 代表离线模式运行,0 代表没有运行
12 :握手状态信息,1 代表有握手信号,0 代表没有握手信号
13 :使能标记位,1 代表使能,0 代表失能
14 :归零结束标记,1 代表归零结束,0 代表归零没有结束
16 :传感器 5 状态信息
17 :传感器 6 状态信息
24 :编码器错误标记,1 代表出错,0 代表正常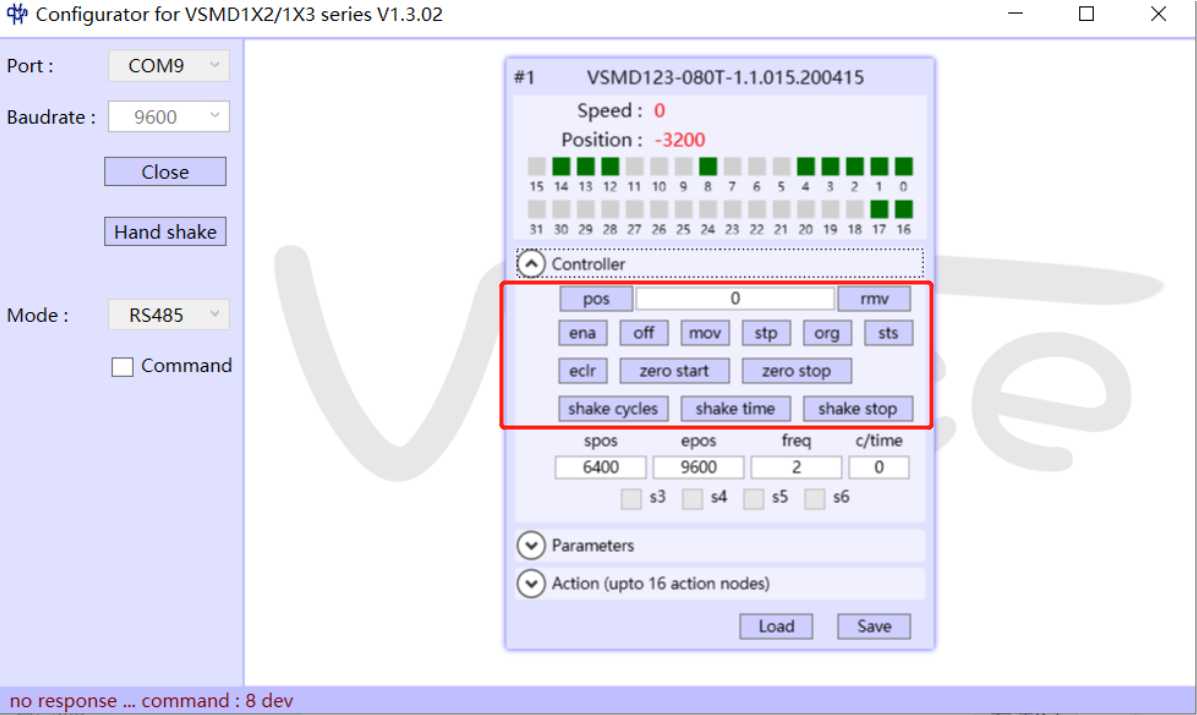
pos:绝对目标位置,单位是脉冲数,点击 pos 电机运行到设置位置
rmv:相对目标位置,单位是脉冲数,电机 rmv 电机相对于当前位置运行
ena:电机使能,Bit13 设置为 1
off:电机失能,Bit12 设置为 0
mov:速度模式,在使能状态下,根据设置速度一直运行
stp:电机减速停止
org:设置当前位置为零位
sts:得到当前状态信息,包括速度,位置和状态位
eclr:清除编码器错误状态
zero start:归零开始运行
zero stop:归零过程停止
可在0处输入你想输入的位置,点击rmv或者pos进行移动。
随后按照下图参数进行对应设置。
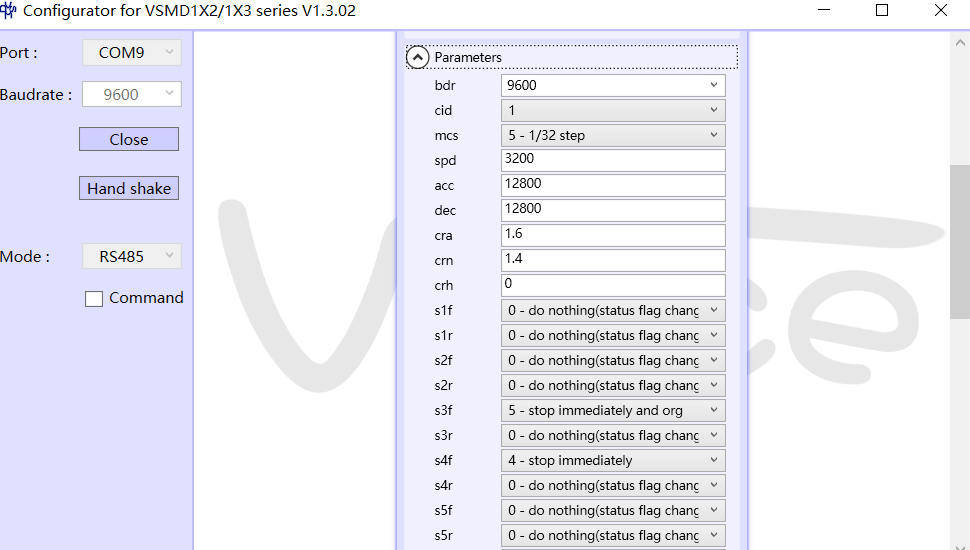
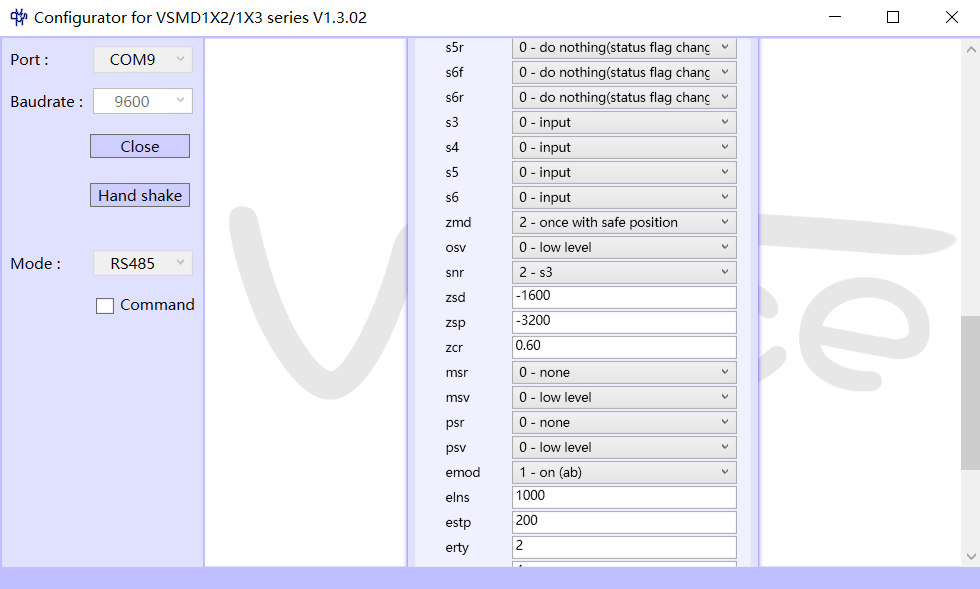
然后点击save进行保存。
cid: 485 总线电机的站点号,范围是 1~32,默认是 1
mcs: 细分,0~5 对应 1/2/4/8/16/32 细分
spd: 运行速度,单位是脉冲频率,-192000~192000Hz acc 加速度,单位是脉冲频率,0~192000000 dec 减速带,单位是脉冲频率,0~192000000
cra: 加速电流,电机在加速过程中的电流,范围是 0~2.5
crn: 运行电流,电机达到设置速度运行中的电流,范围是 0~2.5
crh: 保持电流,电机在使能并且停止运动的时候的电流,范围 0~2.5
s1f: 传感器 1 在下降沿触发的动作
s1r: 传感器 1 在上升沿触发的动作
s2f: 传感器 2 在下降沿触发的动作
s2r: 传感器 2 在上升沿触发的动作
s3f: 传感器 3 在下降沿触发的动作
s3r: 传感器 3 在上升沿触发的动作
s4f: 传感器 1 在下降沿触发的动作
s4r: 传感器 1 在上升沿触发的动作
s5f: 传感器 2 在下降沿触发的动作
s5r: 传感器 2 在上升沿触发的动作
s6f: 传感器 3 在下降沿触发的动作
s6r: 传感器 3 在上升沿触发的动作
s3: 设置 s3 为输入还是输出
s4: 设置 s4 为输入还是输出
s5: 设置 s5 为输入还是输出
s6: 设置 s6 为输入还是输出
zmd: 归零模式,on 开启,off 关闭,二次接近归零模式
osv: 归零用传感器是常开还是常闭,常开设置 1,常闭设置 0
snr: 选择归零用传感器,0、1、2 分别代表 S1、S2 和 S3
zsd: 归零速度
zsp: 归零结束后停止的位置,单位是脉冲数
msr: 设置负极限传感器
msv: 负极限传感器是常开还是常闭
psr: 设置正极限传感器
psv: 正极限传感器是常开还是常闭
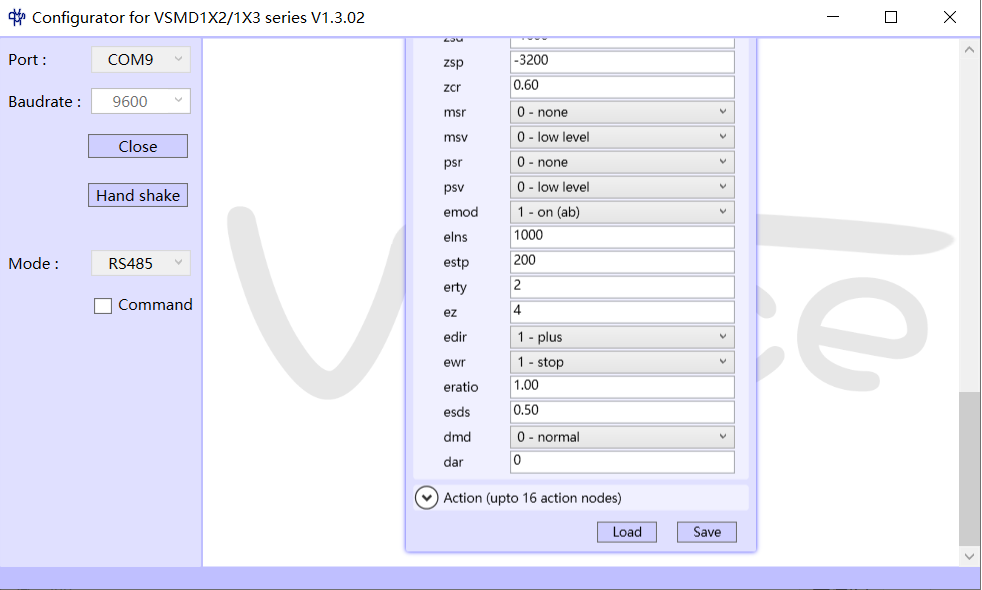
emod: 编码器功能开启设置。0:关闭;1:开启
elns: 编码器线数 estp 电机每圈整步数(360/步距角)
erty: 堵转后重试次数,0 是无限次尝试
ez: 编码器灵敏度,范围 0~100,参数越小,灵敏度越高
edir: 编码器方向。0:负方向;1:正方向
ewr: 编码器发送错误后动作处理。0:无动作;1:停止;2:失能
dmd: 离线模式:0:速度模式; 1:位置模式; 2:位置模式,加电后先运行归零程序
dar: 加电后多长时间启动离线模式运行。单位秒,0 代表不启动。