自动控制原理基础学习
最新推荐文章于 2023-03-01 08:42:39 发布

魔城烟雨
 最新推荐文章于 2023-03-01 08:42:39 发布
最新推荐文章于 2023-03-01 08:42:39 发布
 阅读量2.1k
阅读量2.1k
 收藏
18
收藏
18
 点赞数
2
点赞数
2
最新推荐文章于 2023-03-01 08:42:39 发布
阅读量2.1k
收藏
18

 点赞数
2
点赞数
2

目录
文章目录
- 目录
- 摘要
- 1.一阶线性系统
- 2.二阶线性系统
- 3.典型环节
- 1.比例环节
- 2.积分环节
- 3.微分环节
- 4.惯性环节
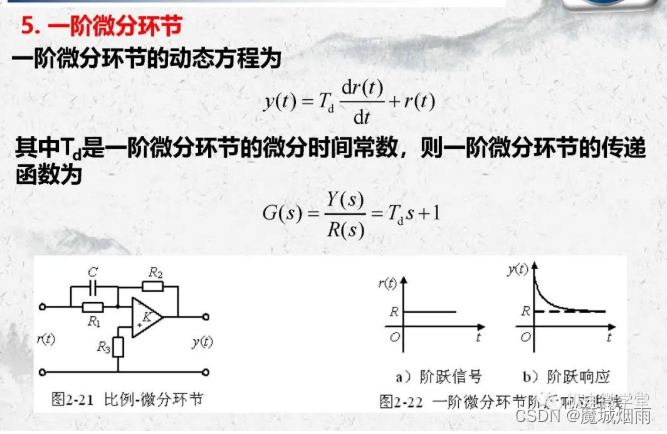
- 5.一阶微分环节
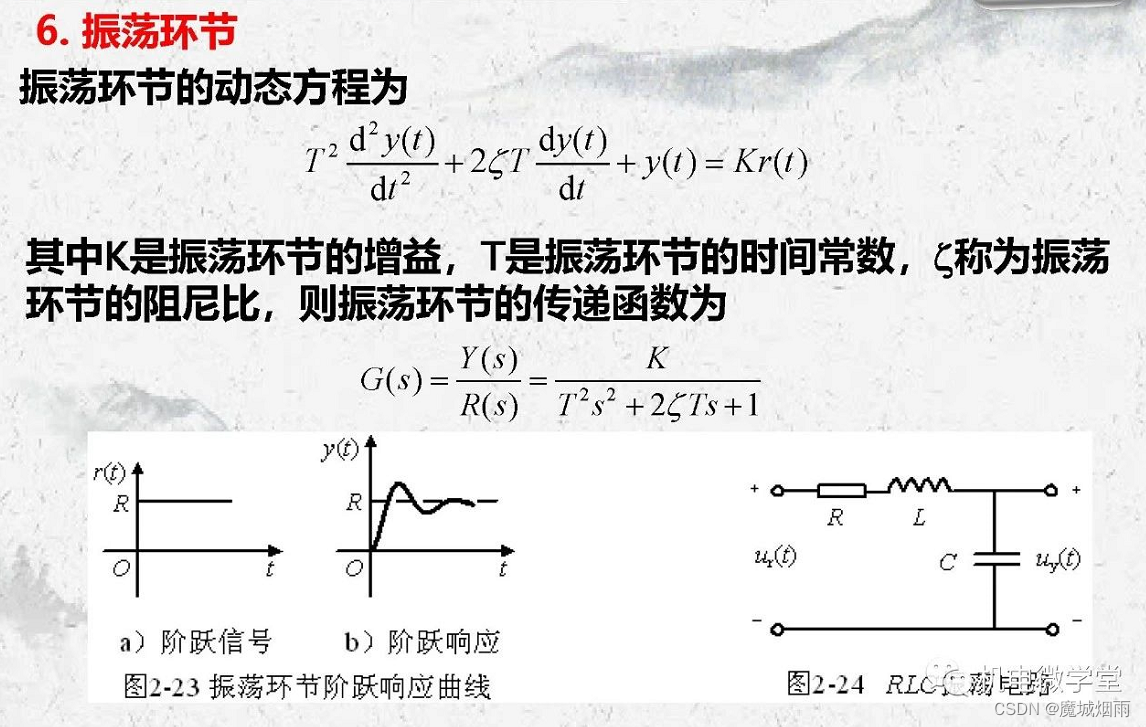
- 6.振荡环节
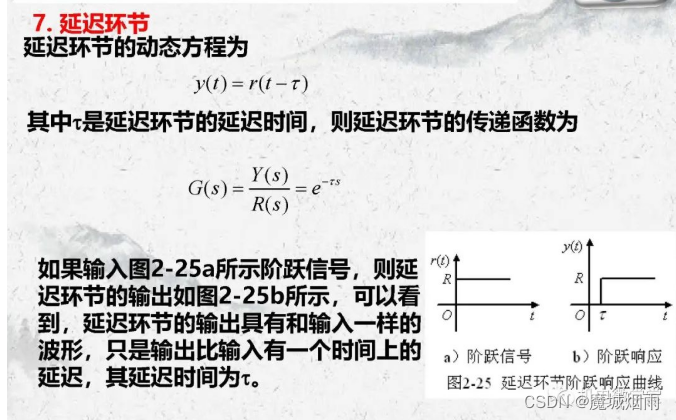
- 7.延迟环节
摘要
本节主要记录自动控制原理中两个常用的微分方程。
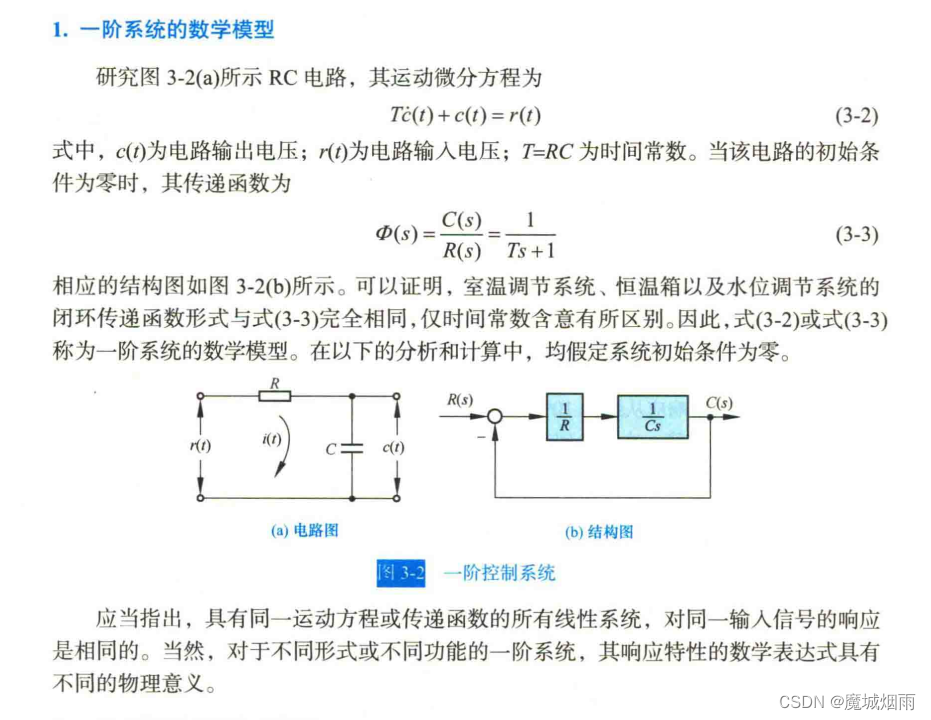
1.一阶线性系统
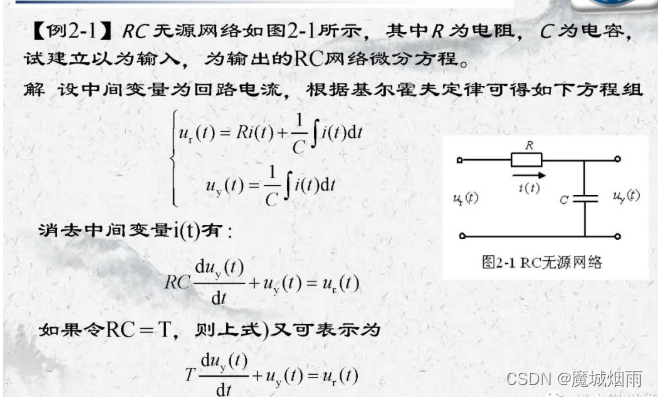
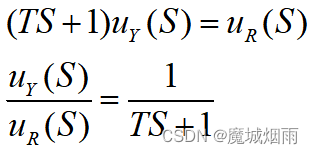
如果上式进行拉普拉斯变换可以得到:系统的闭环传递函数为:
这里也可以参考自动控制原理(胡寿松版本)
2.二阶线性系统

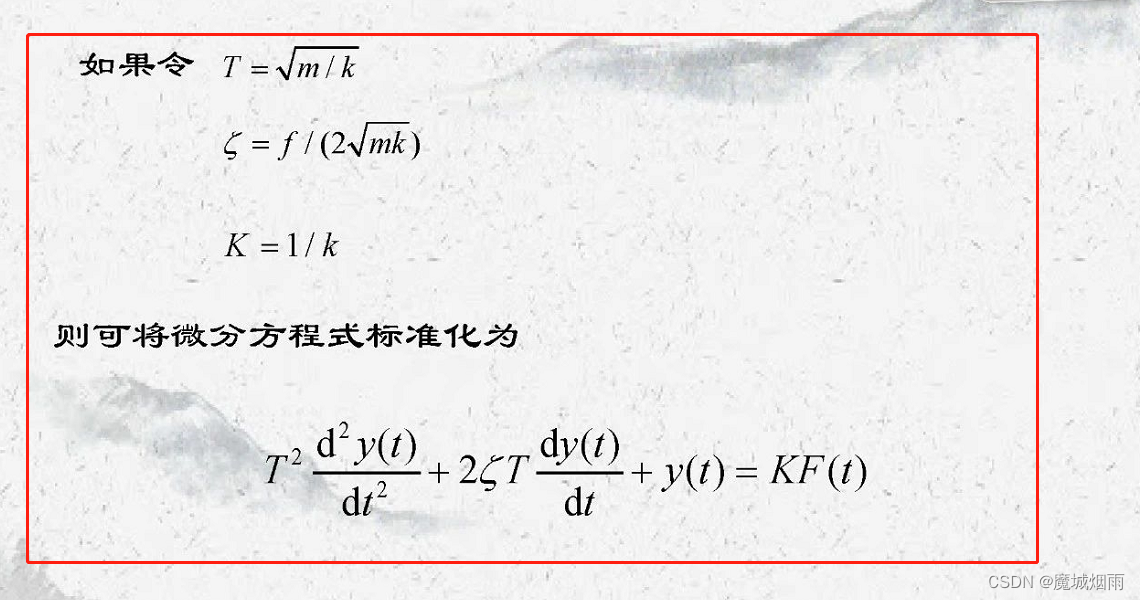
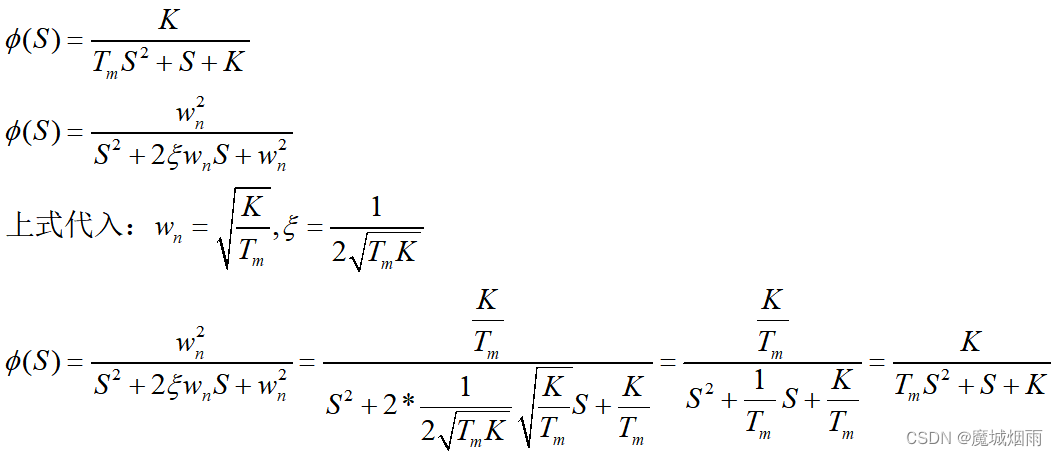
上式进行拉普拉斯变换可以得到:

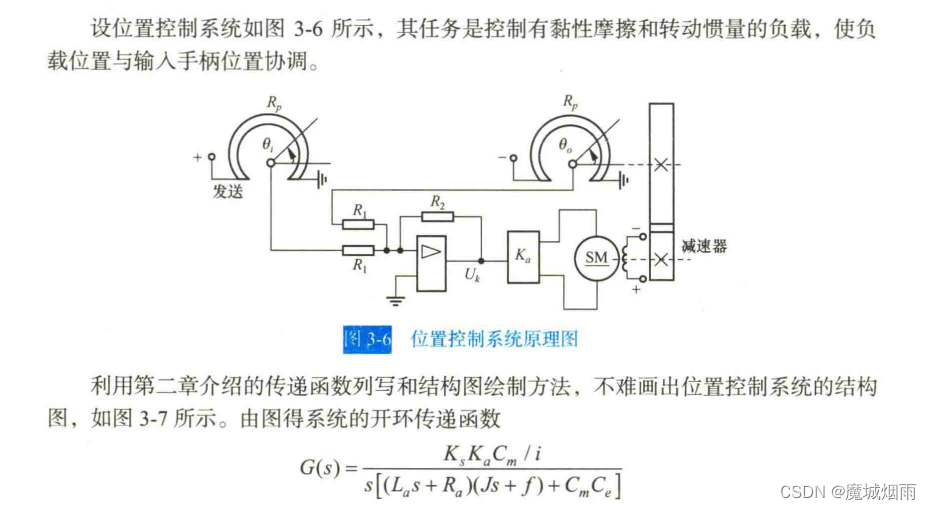
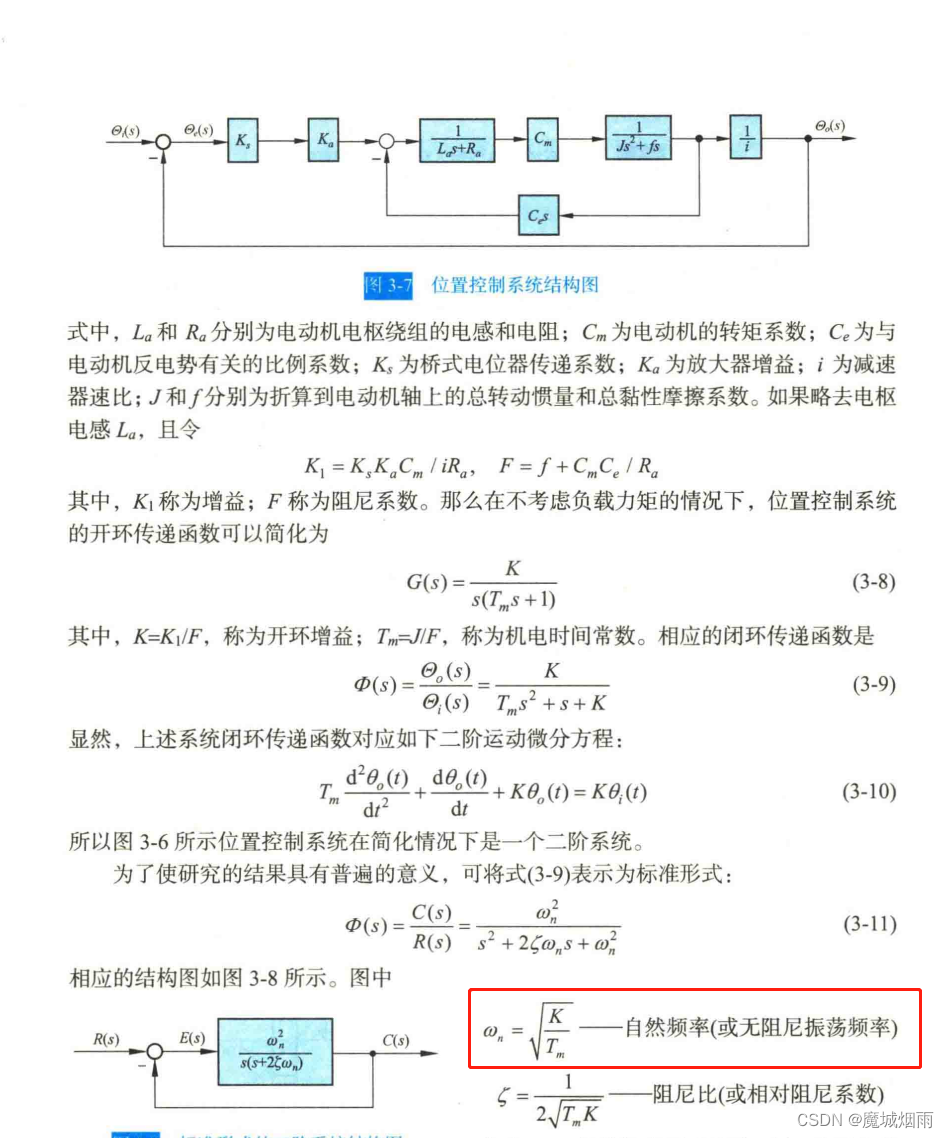
这里我们需要重点记住公式3-9和3-11
3.典型环节
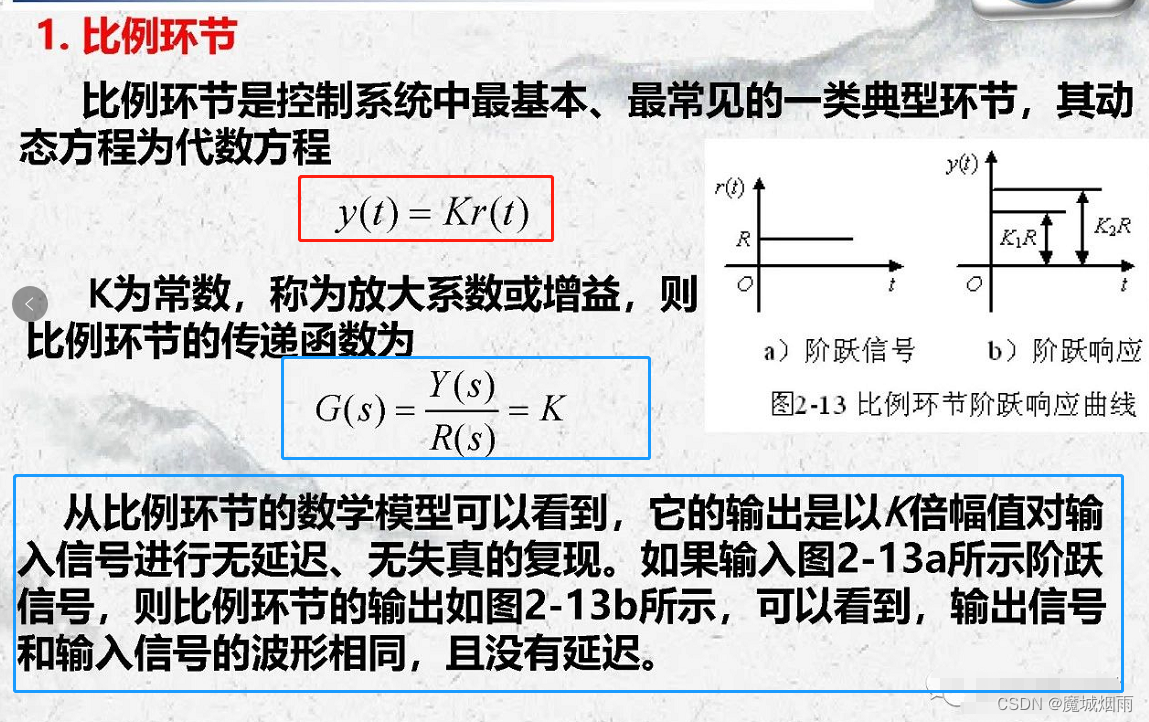
1.比例环节
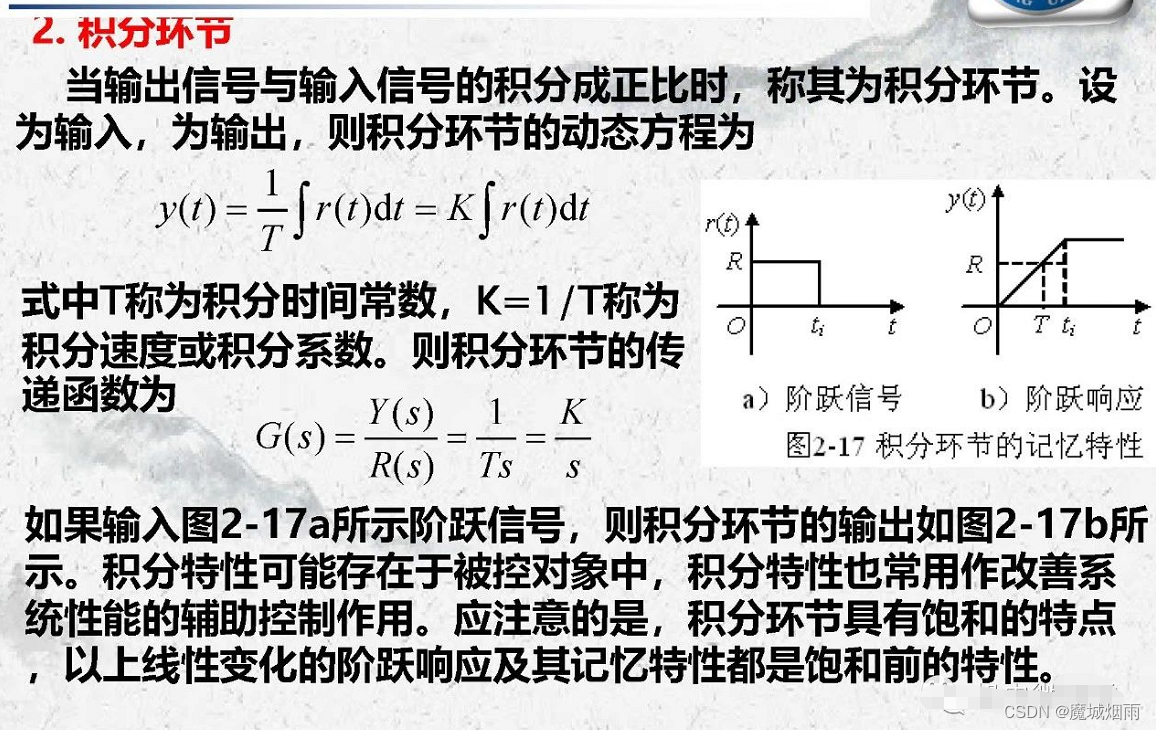
2.积分环节
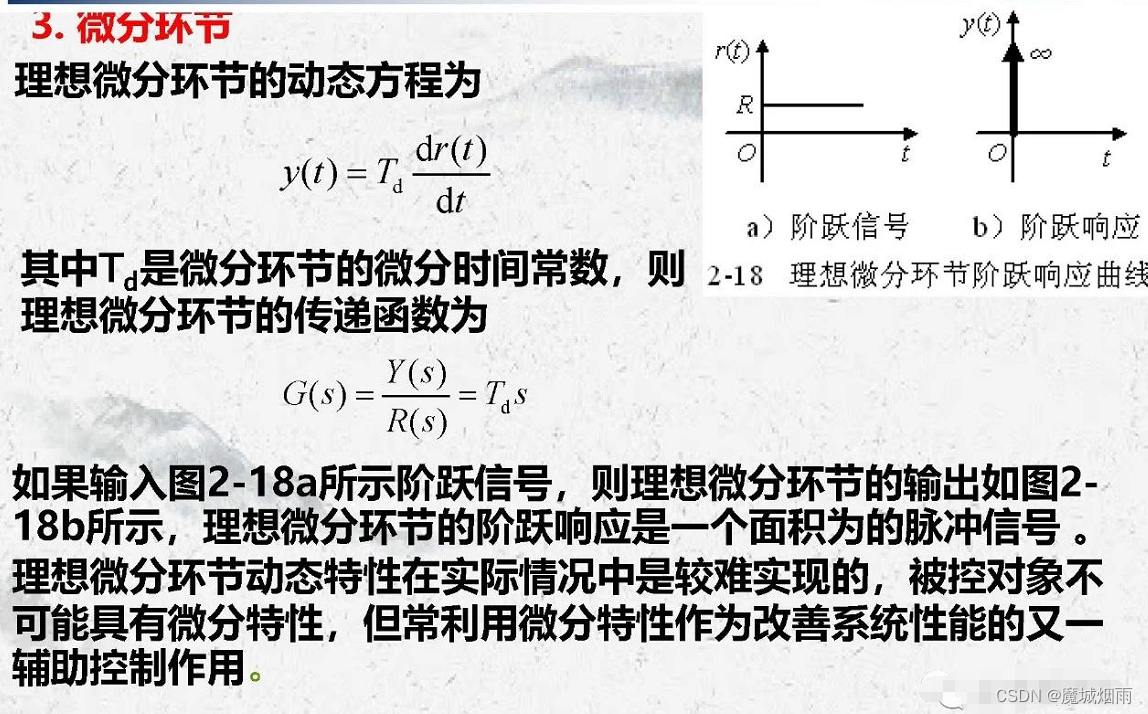
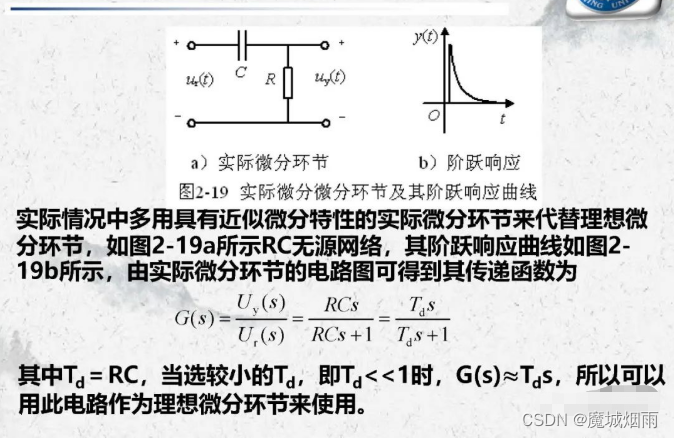
3.微分环节
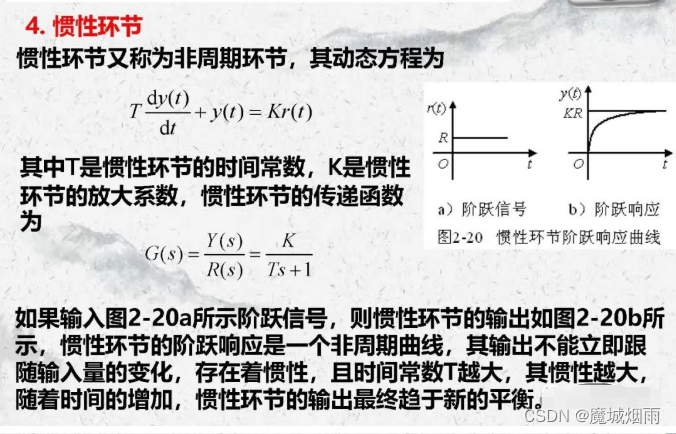
4.惯性环节
5.一阶微分环节
6.振荡环节
7.延迟环节
















 8994
8994











 暂无认证
暂无认证



























 到【灌水乐园】发言
到【灌水乐园】发言












贾专家: 行,那我再研究一下
魔城烟雨: 一部分是,一部分是得到目标速度,进行刹车相关操作
贾专家: 文章最后得到的目标加速度是作为前馈参与到后面的姿态控制器运算吗
魔城烟雨: 没什么关系
贾专家: 博主想问一下,这里计算的目标加速度和PID得到的期望加速度是什么关系?