labelCloud 开源三维点云工具标注自制点云数据集(以.bin格式点云为例)

Shawn_1223
 已于 2022-10-21 15:20:44 修改
已于 2022-10-21 15:20:44 修改
 阅读量5.7k
阅读量5.7k
 收藏
80
收藏
80
 点赞数
7
点赞数
7
已于 2022-10-21 15:20:44 修改
阅读量5.7k
收藏
80

 点赞数
7
点赞数
7
于 2022-10-21 15:06:32 首次发布



一、软件安装
1.以如下命令安装(下载可能有问题,需要网络好一些):
git clone https://github.com/ch-sa/labelCloud.git2.在Conda环境下新建一个虚拟环境安装标注软件所需的依赖(对网速有要求):
conda create -n label3.8 python=3.8 -y3.进入创建的虚拟环境:
conda activate label3.84.将需要标注的.bin格式(已经转换好)的点云文件放入pointclouds文件夹下(labels为标注好后对应保存标签的位置):
在下载的标注软件labelCloud路径下启动配置的虚拟环境,安装相关依赖:
pip install -r requirements.txt
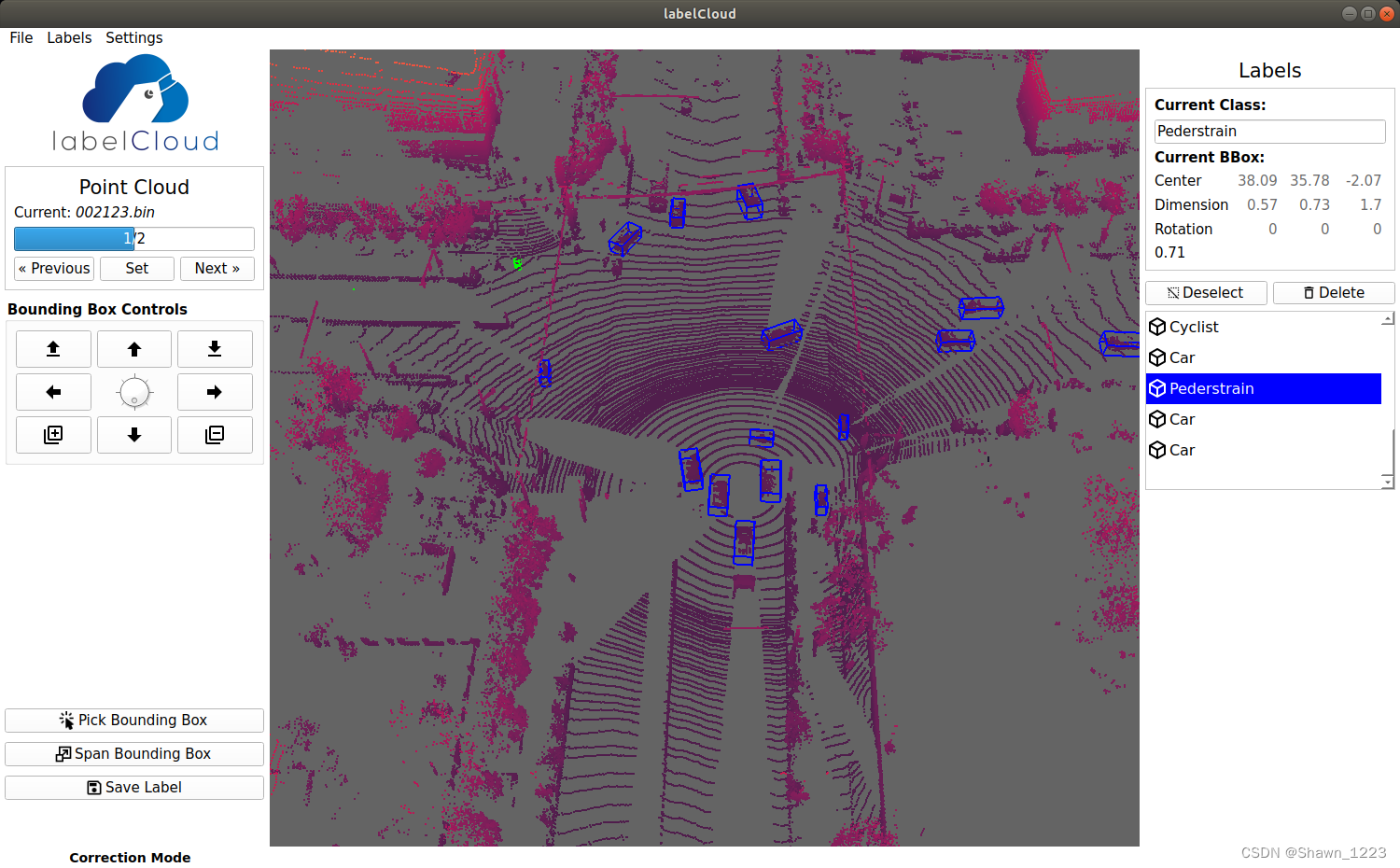
输入如下代码启动软件(展示的是已标注好的):
python labelCloud.py
二、标注Tricks
1.标注框移动:
QWE 控制框上下、左右、前后移动;
ASD
2.标注框转动:
X/Y控制标注框转动,标注时尽量将标注框内显示的箭头指向车头朝向位置;
3.标注框(单面)尺寸调节:
鼠标停留在标注框某个面上后,移动滚轮可调节当前标注框鼠标所在面的大小(前后移动);
4.标注视野移动:
鼠标点击长按右键并拖动鼠标,能够移动视野区域;
5.标注视野分辨率改变:
鼠标只在标注视野内滚动滚轮则为改变视野分辨率(放大或缩小);
6.标注设置:
在顶栏找到“Setting==>Change Setting”按钮可对标注内容进行设置(框初始大小,类别数量,标注格式)。
三.基于Open3d可视化:
1.标注好后的标签如下:
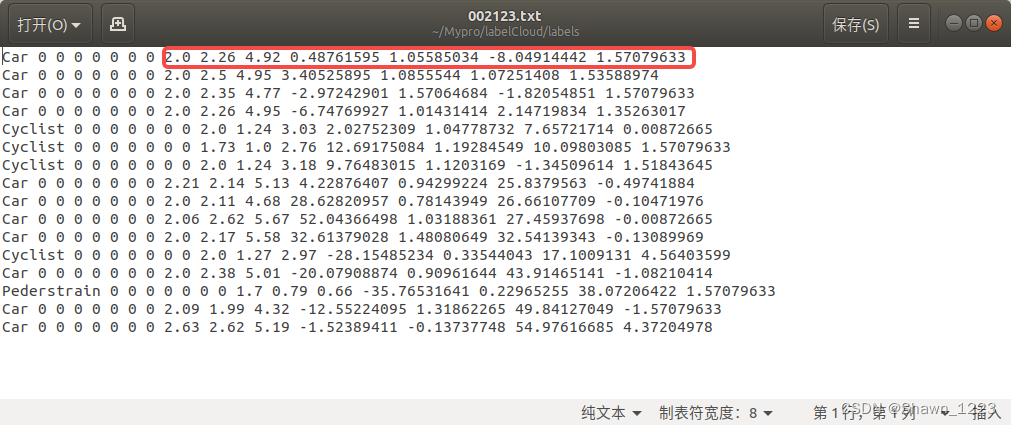
红框内数据按位分别表示: h w l(高宽长) x y z(相机坐标系下标注框的几何中心) yaw(相机坐标系下的朝向角),即标注形式与kitti数据集标注格式保持一致(除了xyz,kitti是底面中心),因此在Lidar坐标系下可视化需要对应转换,有关Lidar坐标系和Cam坐标系的表达可参考:
KITTI 3D目标检测数据集解析(完整版)_Maples丶丶的博客-CSDN博客_kitti目标检测
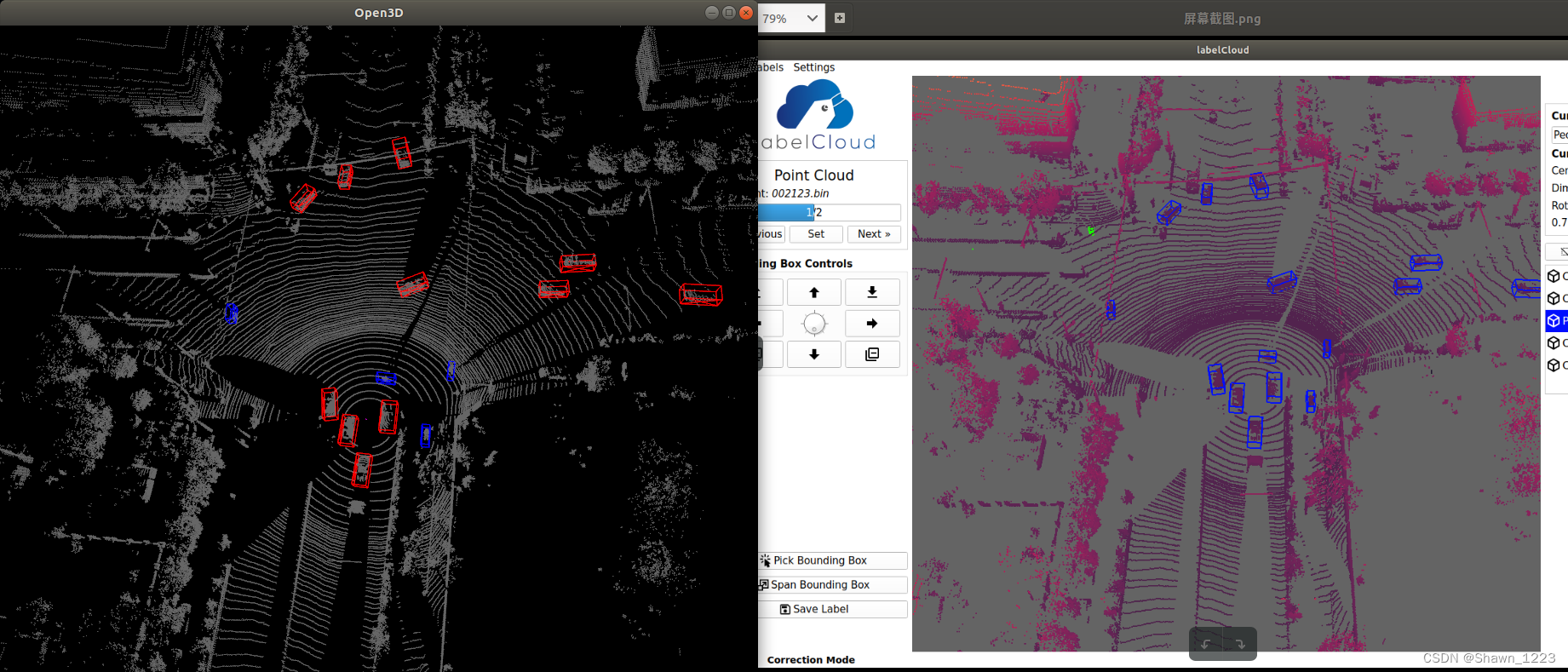
2.令Lidar坐标系下对应数据设置为:h` w` l` x` y` z` yaw`,则有如下关系:
h`=h w`=w l`=l x`=z y`=-x z`=-y yaw`=yaw + pi/2
根据对应关系可在Lidar坐标系下可视化对应的标注结果,如下:
总结
最后感谢: 利用 labelCloud 开源工具标注自己的点云数据集为KITTI标注格式教程(支持pcd、bin格式点云)_用券买土豆的博客-CSDN博客_点云数据集标注
提供的参考。















 8641
8641










 暂无认证
暂无认证









 到【灌水乐园】发言
到【灌水乐园】发言










zcrnb: 如果点云范围很大软件里显示不全,labelcloud文件夹下有个config文件,进去之后修改near plane和far plane可以放大点云显示范围 如果放大缩小很慢,左上角change setting里可以修改参数 我的问题是保存的label是json格式,怎么保存为txt格式呢
zesong888: 转onnx成功了吗?亲
m0_74532182: 你好 我想问一下 标注的时候 3d框里面的箭头 代表什么意思呀
zcrnb: 我也是自制点云数据集,请问大哥训练成功了吗
m0_58563002: 你好,我想请问这个txt标注中标注类别名称后面的0 0 0 0是什么啊,纯点云标注,把这个来训练模型是会有影响吗